David's Astronomy Pages
Notes - Session 1020 (2022-06-27)
Notes
(S1020A)
Notes
Main
Home
Page
Notes
(S1021A)
David's Astronomy Pages
|
Notes (S1020A) |
Notes Main |
Home Page |
Notes (S1021A) |
Main aims
Equipment & Software
Highlights
Summary Plots & Logs
| Observing Plan | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Observing Result |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
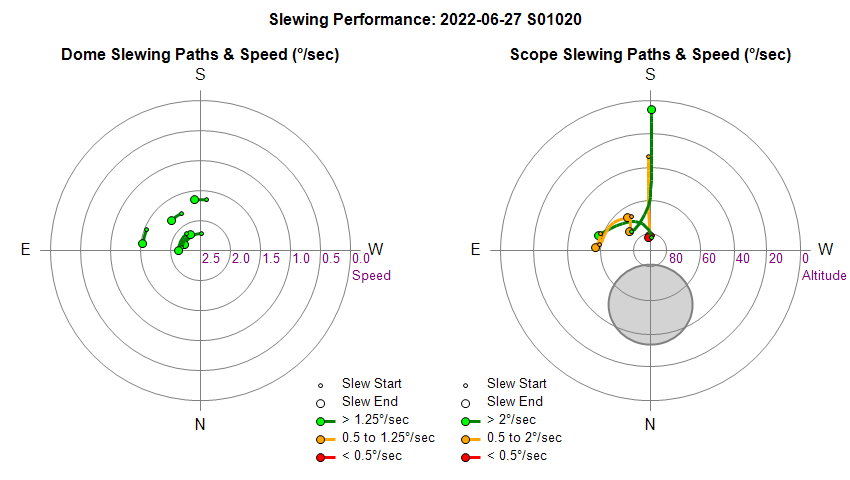
| Dome & Scope Slewing Performance | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
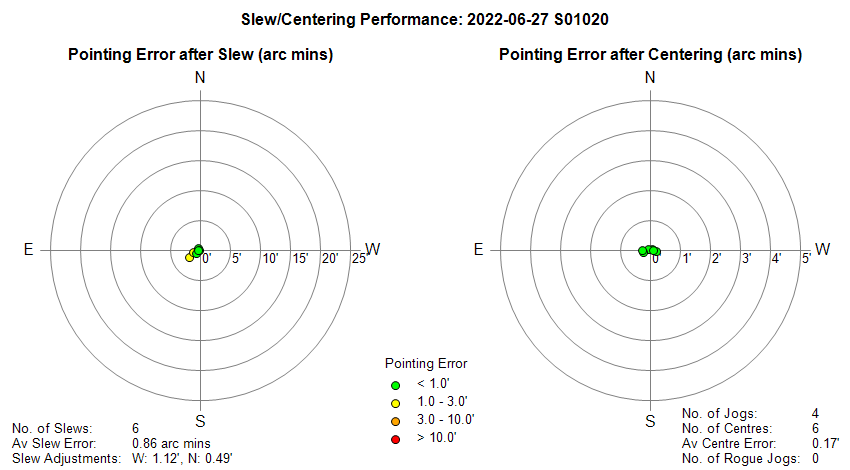
| Slew/Centering Performance | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
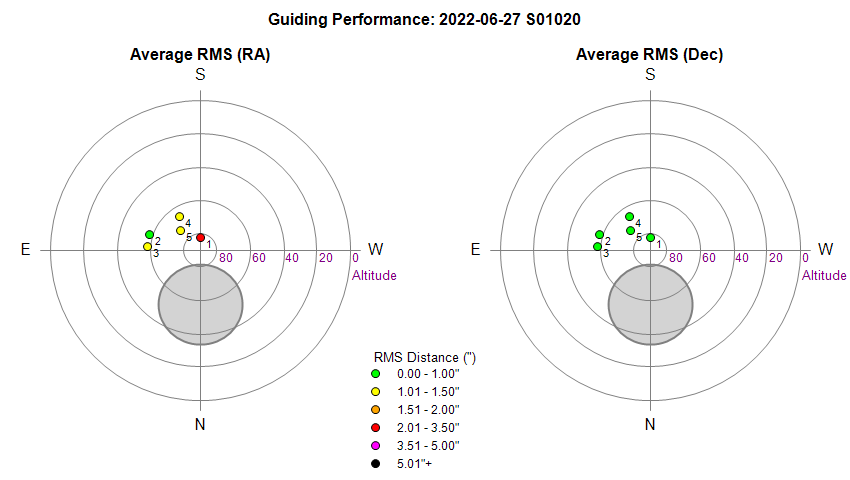
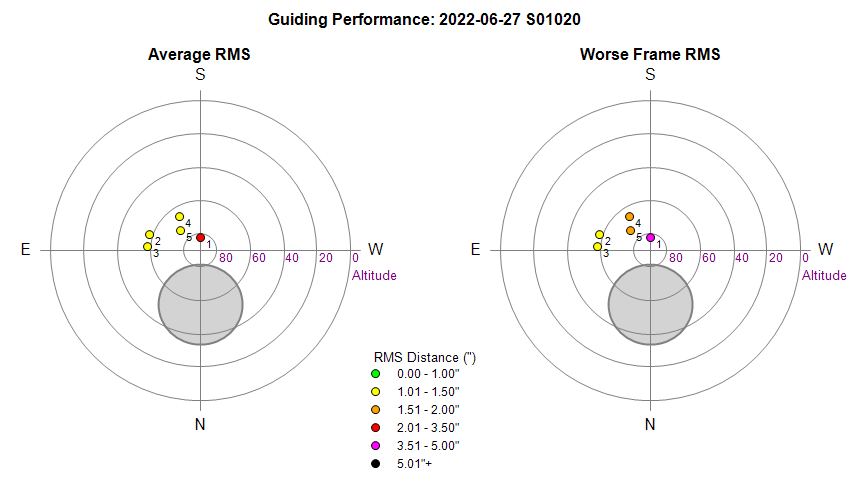
| Guiding Performance | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Sky Conditions (Locate Frames) | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
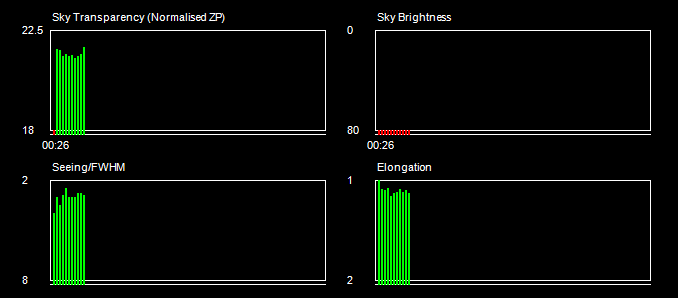 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Night Sky Summary Plot Top axis: Sky Brightness at Zenith (in ADU/s) Lefthand axis: Local Time (hh LT). Righthand axis: Sun Altitude (degs) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
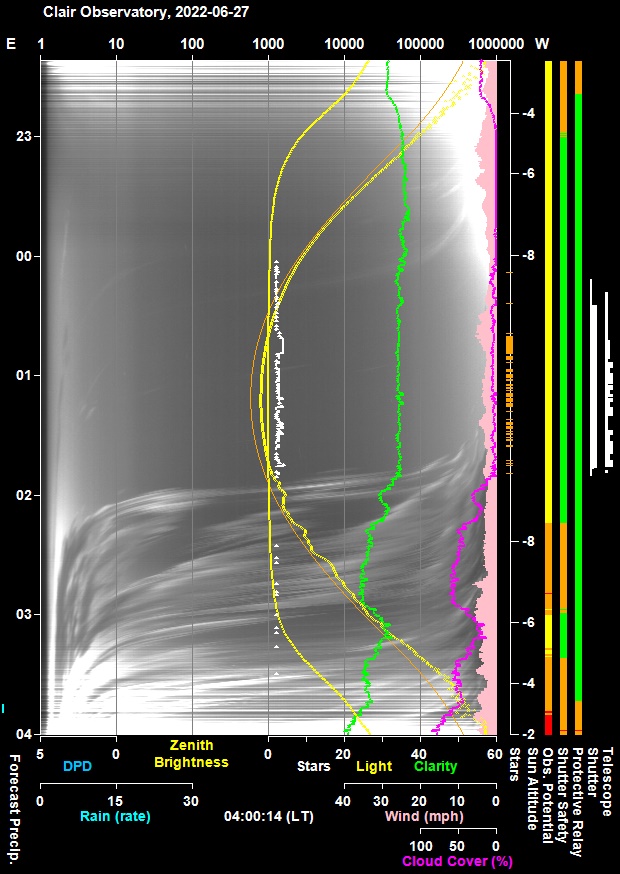 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
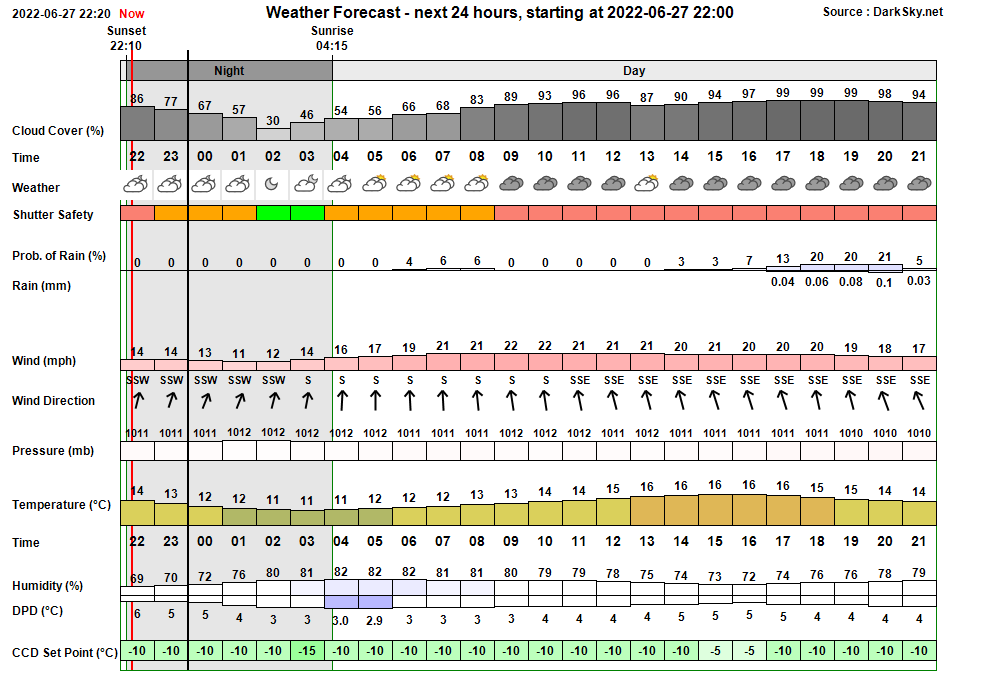
Actual Weather vs Pre-Session Weather Forecast |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Session Event Log | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Session Alerts | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Back to Top
Back to Top
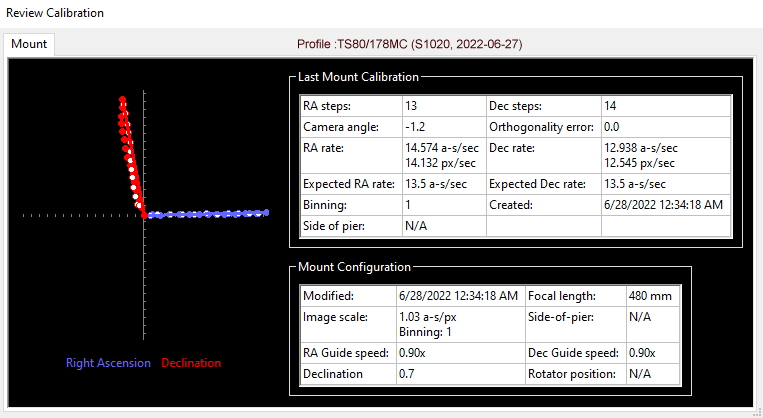
Calibration (Profile TS80/178MC)
PHD2 Calibration performed for Profile 'TS80/178MC' on a starfield close to
Dec 0 using LX200 Mount with guide rate x0.90.
(This was required as
previous Calibration had been lost when the Operation System and Software
(including PHD2) on the Observatory Computer had to be reinstalled following
an otherwise unresolveable boot access failue on 2022-06-16,
details)
Notes
Results
Guiding results from session using new PHD2 Calibration in terms of overall guiding performance and individual guide runs were acceptable
Actions
Back to Top
DeviceHub was updated on Observatory Computer today (2022-06-29)
from version 6.6.0.12 to new 6.6.0.13 version.
It is hoped
that this version with get around the issue that Pulsar Dome doesn't set
Slewing=True until some 0.7-0.8s after receipt of a SlewToAzimuth command.
Current 6.6.0.12 version goes to normal polling (every 5000ms) after seeing
Slewing=False from the first Get Slewing poll after beginning SlewToAzimuth.
The new 6.6.0.13 version will hopefully stay on fast polling (every 1000ms) for
3s and after eventually polling Slewing=True command will then stay on
Slewing=True until the end of the slew.
6.6.0.13 Release Notes
- For all devices, extend fast polling for 3 seconds after completion of a
slew..
Activity Log
After installation of the new version the
Activity Log Capacity value (which was reset to its standard default value
(125000) during installation ) was again increased ten-fold (1250000) by editing
the DeviceHub configuration file (see notes
DeviceHub 6.6.0.10,
2022-06-02 )
Results
Daytime testing of DeviceHub 6.6.0.13 showed that
whilst fast polling is extended for 3s after completion of a slew the change
hasn't resolved the issue whereby short dome slews (<5 deg Az change) and first
part of longer slews (first 5s) are not being seen by the Dome Client.
It looks likely that I will need to contact Pulsar Observatories to ask
for an ASCOM driver update for the Pulsar Dome that honours the expectations of
Asynchronous operations described in
https://ascom-standards.org/COMDeveloper/Async.htm. In particular it needs
to correctly set Slewing Completion Property (Dome.Slewing) to True when
theDome.SlewToAzimuth method is called (or otherwise raise an exception).
Currently Dome.Slewing is still False for up to 1s after calling
Dome.SlewToAzimuth which can be interpreted by the client during this time as
the dome has reached its new position and it can continue with the next task
(such as Imaging). This happens because the dome driver waits for
information in its next poll of the hardware to see that dome is moving before
it sets Dome.Slewing=True.
>> Device Hub Releases : https://github.com/ASCOMInitiative/ASCOMDeviceHub/releases
Update 2022-07-30 Senior member of ASCOM Support advises against trying to work round the issue in Device Hub because this is really a bug in the dome driver. They recommend to point the issue out to Pulsar Observatories and get them to fix it.
Update 2022-07-02. Pulsar Observatories have been
contacted with regard to the Pulsar ASCOM Driver, the issues using it and
the potential to get it updated to bring into line with current ASCOM
programming standards for domes.
Back to Top
Outside Temperature/Humidity Sensor readings were noticed to have flat-lined on weather/environment graphs, and data still hadn't come back online after 36 hours.
Low battery level was suspected and was confirmed today (2022-07-02) by the absence of any digits on the small LED screen on the Oregon Scientific sensor. Batteries (2 x AAA) were replaced.
It was hoped that Base Station might automatically pick up the new data
from the sensor but it didn't. The issue was resolved by resetting the
Weather Station's base station, resetting the USB Comms Hub /
Link between AllSky/Weather Computer and Base Station and by restarting VWS
and AstroWeather.
Back to Top
The Observatory's Dome (a 2.2m Pulsar Observatories Dome) is normally operated via an ASCOM Driver that was supplied with the dome in 2018. It's not known whether the driver has been updated since then or not, so the comments below are entirely with reference to the originally supplied driver (“Pulsar Observatories ASCOM Setup.msi”) which has a last modified date of 2017-12-15.
Whilst the driver has been successfully used the driver since 2018 it’s
not been without the employment of various workarounds in my observatory
control program when it comes to monitoring dome behaviour during slewing
and shutter operation. In the current system DeviceHub (an application
supplied with the ASCOM installation) provides automated slaved operation of
the Pulsar Dome based on the telescope's position / target). This mostly
works but proper ASCOM based control of the dome can’t be fully achieved
without a fix to the Pulsar Driver that would bring it into line with
current ASCOM programming standards for domes.
Dome.SlewToAzmiuth
The Pulsar ASCOM Driver tries to follow ASCOM best practice of operating
Asynchronously such that on receiving a call to say Dome.SlewToAzimuth, the
driver initiates the slew process (unless there was any reason to throw an
exception) and then returns immediately (in practice this is a time of
around 5-40ms) which leaves the client program to do other things in the
meantime (this is as opposed to Synchronous operations, an older & less
favoured style of programming, where a Dome.SlewToAzimuth call only returns
when the dome has reached the new azimuth position).
When the
operation is asynchronous and the client program needs to know that the dome
has reached its new position, it checks the ‘completion’ property, which in
this case is the Dome.Slewing property. If it is False then the client
program can proceed with its next task - typically imaging (of course
this will be once the telescope has also reached its new position). If
Slewing is still True, then the client program needs to continue waiting
until Slewing eventually becomes False (unless there is some issue during
the slew and an exception if thrown). That’s how it is meant to work...
... but to work correctly the client program expects to see
Dome.Slewing=True immediately after a call
to Dome.SlewToAzimuth.
[ see the ASCOM
Standard on Asynchronous Programming
(https://ascom-standards.org/COMDeveloper/Async.htm) regarding this
expectation ]
The present Pulsar driver violates this fundamental
rule and doesn’t return Slewing=True
immediately after a call to Dome.SlewToAzimuth. Instead it returns
Slewing=False to the client program for up to 1s after a call to
SlewToAzimuth(). The driver only begins to return True after it receives a
fresh set of states from the dome hardware - this is taken from dataset that
is written to driver's ASCOM Log file as a ‘Volatile’ message line.
Apparently this is a common mistake for driver developers in that it exposes
its internal state rather the necessary external facing state.
Whilst the slew monitoring routines in the observatory's control program
(AstroMain) can recognise and workaround the idiosyncrasies in the Pulsar
driver behaviour and make additional checks to ensure that imaging can’t
begin immediately that a Dome.Slewing=False is seen from the Dome, the
monitoring of a dome slew (used to automatically spot any performance issues
with the dome such as any hang-ups /slipping points etc) becomes compromised
as the observatory system is tied to using the DeviceHub (for it’s critical
role in providing coordinated slaved operation of the Pulsar Dome based on
telescope position / target) and how it goes about polling the Pulsar Dome.
The DeviceHub application follows ASCOM standards/expectations; after
calling Dome.SlewToAzimuth() if it sees Slewing=False from the Pulsar Dome
it interprets this as the Slewing has finished (i.e. the dome is at it’s new
target) and changes its polling rate from fast rate (every 1s) to normal
rate (very 5s). If a slew is less than say 5 deg, then even though the
driver’s internal state becomes true at the next reading of the dome
hardware (typically at around T+0.7s or so), the entire slew will complete
within 3-4s, so that by the time of the next poll by DeviceHub, the dome has
already arrived at it's new position without the observatory control program
ever seeing the dome go through a Slewing=True state. The following
log example show the ASCOM log messages from a 5 deg slew from Az 95.0 to Az
90.0, with commentary in blue.
11:49:20.806 Slewing Get True (Slewing=False returned to client but written
true in log file due to a reporting bug)
11:49:21.433
Volatile 90.0 0 0.000000 90.0 0 1 970 15004 -2 -25625 18710 2363 1 (dome
stationary)
11:49:22.441 Volatile 90.0 0 0.000000 90.0 0 1 970 15004 -2
-25625 18710 2363 1 (dome stationary)
11:49:22.739 SlewToAzimuth
Start 95 (Command received to slew dome to Az
95.0 (from 90.0) )
11:49:22.776 SlewToAzimuth Completed
(Call returned to client)
11:49:22.777 Azimuth Get Compleate
11:49:22.777 Slewing Get True
(Slewing=False returned to client)
11:49:22.778 Azimuth Get Compleate
11:49:22.778 Slewing Get True
(Slewing=False returned to client, Device Hub
concludes Slew is completed & reverts to Normal Polling, every 5s)
11:49:23.448 Volatile 90.9 1 0.000000 95.0 1 1 970 15004 -2 -25562 18710
2363 1 (dome slewing)
11:49:24.456 Volatile 93.2 1 0.000000 95.0 1 1 970
15004 -2 -25404 18710 2363 1 (dome slewing)
11:49:25.464 Volatile 94.6 1
0.000000 95.0 1 1 970 15004 -2 -25302 18710 2363 1 (dome slewing)
11:49:26.664 Volatile 95.0 0 0.000000 95.0 0 1 970 15004 -2 -25275 18710
2363 1 (dome stationary)
11:49:27.671 Volatile 95.0 0 0.000000 95.0 0 1
970 15004 -2 -25274 18710 2363 1 (dome stationary)
11:49:27.784
Azimuth Get Compleate (Azimuth 95.0 returned to
client at this point)
11:49:27.784 Slewing Get True
(Slewing=False returned to client. Slew has
completed without the client ever seeing Slewing=True during process)
Dome.OpenShutter &
Dome.CloseShutter
The text in
https://ascom-standards.org/COMDeveloper/Async.htm clearly
indicates that following a call to Dome.OpenShutter, the client expects to
immediately see Dome.Slewing = True, and
Dome.ShutterStatus = shutterOpening (2). It implies that following a
Dome.CloseShutter call the client would expect to
immediately see Dome.Slewing = True, and
Dome.ShutterStatus =
shutterClosing (3)
The API description for the ASCOM Dome.Slewing
property (https://ascom-standards.org/Help/Developer/html/P_ASCOM_DriverAccess_Dome_Slewing.htm)
is a follows
- True if any part of the dome is currently moving,
- False if all dome components are stationary.
This means
that Dome.Slewing should be True whenever the Dome's shutter is opening or
closing. Review of log file written by the present dome
driver shows “Slewing Get True” during intervals when the shutter is
opening/closing, but with the known reporting bug this means that it is
actually sending Slewing=False to the connected client which means that is
not honouring the ASCOM standard.
Review of log file written by the present dome driver shows the client
does immediately see Dome.ShutterStatus = 2
(shutterOpening) after a Dome.OpenShutter command, and
does immediately see Dome.ShutterStatus = 3
(shutterClosing) following a Dome.CloseShutter call.
However the current process can
occasionally be caught out by a timing gap issue and lead to an unexpected
sequence of shutterStatus values being sent to the client.
In the
following CloseShutter example from a Pulsar ASCOM log file (where
commentary is in blue), it can see that
after the CloseShutter command at 00:41:39.498 (T0), the shutter status
returned to the client immediately changes to ShutterStatus 3 (Closing),
through Slewing remains as False (written incorrectly as True in the Pulsar
log file). But at 00:41:39.901 (T+0.5s) a dataset is read from the hardware
which shows the dome as still being open, and the ShutterStatus supplied to
the client changes back to 0 (Open). Because Slewing is False and not
changed to True during the closing operation, DeviceHub changes to Normal
Polling, which means the downstream client sees ShutterStatus as 0 (Open)
for a further 5s, until the Shutter Status is again read by DeviceHub at
00:41:45.500 (T+6.0s) when ShutterStatus is again seen as being 3 (Closing).
This continues until the ShutterStatus eventually returns 1 (Closed) at the
end of the operation at 00:42:24 (T+44.5s).
00:41:38.698 Volatile 262.3 0 0.000000 262.3 0 0 970 14989 -2
-13524 13231 2352 0
00:41:38.734 ShutterStatus 0 (ShutterStatus 0 (Open) is returned to
client)
00:41:38.734 Slewing Get True (Slewing = False
returned to client, but written incorrectly as True in the log file)
00:41:39.498 CloseShutter Completed (Command received to CloseShutter)
00:41:39.498 ShutterStatus 3 (ShutterStatus
3 (Closing) is returned to client)
00:41:39.498 Slewing Get True (Slewing = False returned to client, it should
return True)
00:41:39.499 ShutterStatus 3 (ShutterStatus
3 (Closing) is returned to client)
00:41:39.499 Slewing Get True (Slewing = False returned to client, it should
return True)
00:41:39.901 Volatile 262.3 0 0.000000 262.3 0 0
970 14989 -2 -13524 13231 2352 0
00:41:40.507 ShutterStatus 0
(ShutterStatus 0 (Open) is returned to client)
00:41:40.507 Slewing Get True (Slewing = False
returned to client, it should return True)
00:41:40.508
ShutterStatus 0 (ShutterStatus 0 (Open) is
returned to client)
00:41:40.508 Slewing Get True
(Slewing = False returned to client, it should
return True)
00:41:40.922 Volatile 262.3 0 0.000000 262.3 0 3
970 14989 -2 -13524 13231 2352 0
00:41:41.897 Volatile 262.3 0 0.000000 262.3
0 3 970 14989 -2 -13524 13231 2352 0
00:41:42.873 Volatile 262.3 0
0.000000 262.3 0 3 970 14989 -2 -13524 13231 2352 0
00:41:43.849 Volatile
262.3 0 0.000000 262.3 0 3 970 14989 -2 -13524 13231 2352 0
00:41:44.840
Volatile 262.3 0 0.000000 262.3 0 3 970 14989 -2 -13524 13231 2352 0
00:41:45.500 ShutterStatus 3 (ShutterStatus
3 (Closing) is returned to client)
00:41:45.502 Slewing Get True (Sl(Slewing = False returned to client, it should
return True)
(and so on until)
00:42:23.145 Volatile 262.3 0 0.000000 262.3
0 3 970 14989 -2 -13523 13231 2352 0
00:42:23.547 ShutterStatus 3 (ShutterStatus
3 (Closing) is returned to client)
00:42:23.547 Slewing Get True
00:42:24.163 Volatile 262.3
0 0.000000 262.3 0 1 890 14727 -273 -13523 14227 2334 0
00:42:24.565
ShutterStatus 1 (Sh(ShutterStatus 1 (Closed) is
returned to client)
00:42:24.565 Slewing Get True ((S(Slewing = False returned to client, but written
incorrectly as True in the log file)
Summary
Following review the present ASCOM driver has the following issues:
This issues have been sent to Pulsar Observatories today (2022-07-02) with a request to provide an updated driver, that resolves these issues and brings the driver into line with current ASCOM programming standards for Domes.
Benefits
The benefits of an updated ASCOM driver would be as follows:
Potential issues using updated driver
There
is a possibility that during a HardSuspend operation to close the dome's
shutter (in event of heavy cloud or rain) the Dome.CloseShutter call may not
be heard or may not happen if the dome is in the middle of a previous
SlewToAzimuth operation. This may not neccessary be an issue
associated with the new updated driver as there may already be a potential
for the issue in the current system.
DeviceHub's
DomeControl tab (in current 6.6.0.13 version) doesn't allow the shutter to
be operated whilst the dome is rotating. The 'Close Shutter' becomes
greyed-out whilst the dome is changing azimuth position (this is
throught to be possibly by design since for some dome designs there could be
a mechanical/physical issue in moving the shutter if the dome is the
rotating, and vice versa)
.
Tests with DeviceHub and ASCOM.Simulator.Dome show that
Dome.CloseShutter can nevertheless still be successfully called via
DeviceHub.Dome from the client program whilst the dome is rotating. It
is unclear whether this can occur with the Pulsar Dome using even the
present ASCOM driver or a future updated driver. It may be
safest if the AstroMain's CloseShutter operation, turns-off dome slaving
(Dome.Slewing=False) and aborts any slew in progress (Dome.AbortSlew and
then waiting until Dome.Slewing=False), before it calls
objDome.CloseShutter. When the shutter closure is complete the
operation could potentially re-instate the prior Dome.Slaving value if
necessary.
Because there is risk that in event of a HardSuspend the dome may
already be closing (due to Relay initiated closure or due to AstroGuard
initiated closure) - even though timing thresholds shouldn't allow this -
there is a need to check that AbortSlew at this point wouldn't put the
Shutter into an 'Error' state where it couldn't then be closed without user
intervention. Existing code may not call Dome.CloseShutter if the
ShutterStatus already has state 3 (ShutterClosing). Daytime test
using Pulsar Dome with present driver shows that AbortSlew with shutter
opening/closing stops the shutter movement and puts the ShutterStatus into
state shutterError (4). There is no problem in then calling
OpenShutter or CloseShutter at this point.
[ Note: The
API documentation for Dome.AbortSlew method suggests that the Dome.AbortSlew
should set Dome.Slaving to False, however tests using DeviceHub, with
Simulator Scope and Simulator Dome indicate that this doesn't happen.
If a slaved dome slew is in progress and Dome.AbortSlew is used, the slew
stops temporarily but Slaving remains True and then after a few seconds the
dome resumes slew towards a slaved position based on telescope position ]
Registering for 64 bit
In case Pulsar Driver needs to
be registered as 64-bit driver, it would be done like this
for 64-bit
registration - "C:\Windows\Microsoft.NET\Framework64\v4.0.30319\RegAsm.exe"
/register /codebase "yourdriverpath.dll"
for 32-bit registration - "C:\Windows\Microsoft.NET\Framework\v4.0.30319\RegAsm.exe" /register /codebase "yourdriverpath.dll"
Back to Top
| This Web Page: | Notes - Session 1020 (2022-06-27) |
| Last Updated : | 2024-09-25 |
| Site Owner : | David Richards |
| Home Page : | David's Astronomy Web Site |
