David's Astronomy Pages
Notes - Session 1172 (2023-12-05)
Notes
(S1171)
Notes
Main
Home
Page
Notes
(S1173)
David's Astronomy Pages
|
Notes (S1171) |
Notes Main |
Home Page |
Notes (S1173) |
Main aims
Equipment & Software
Highlights
Summary Plots & Logs
Observing Plan |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Observing Result |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Dome & Scope Slewing Performance | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Slew/Centering Performance | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
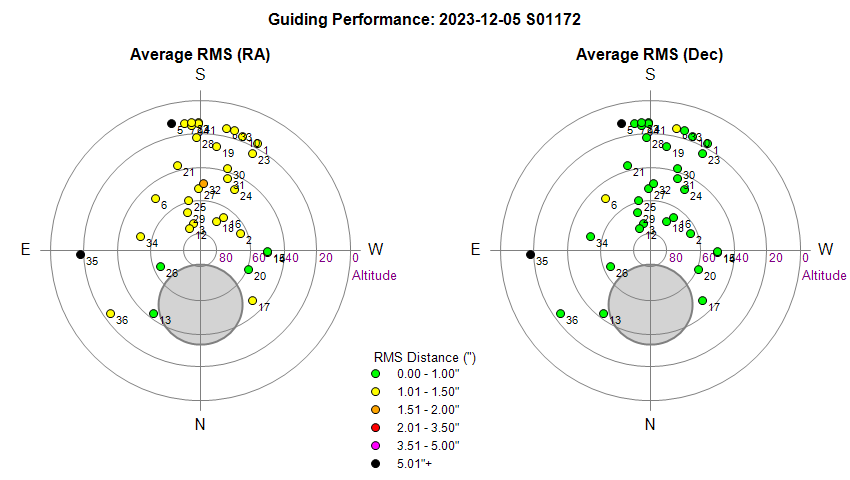
| Guiding Performance | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Sky Conditions (Locate Frames) | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
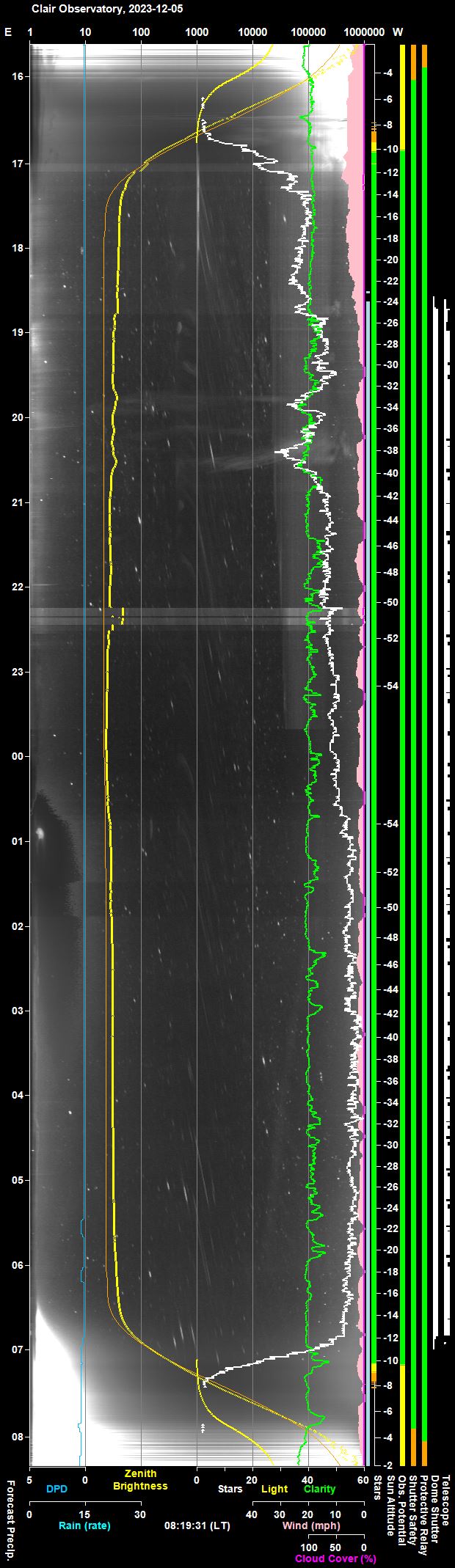
Night Sky Summary Plot Top axis: Sky Brightness at Zenith (in ADU/s) Lefthand axis: Local Time (hh LT). Righthand axis: Sun Altitude (degs) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
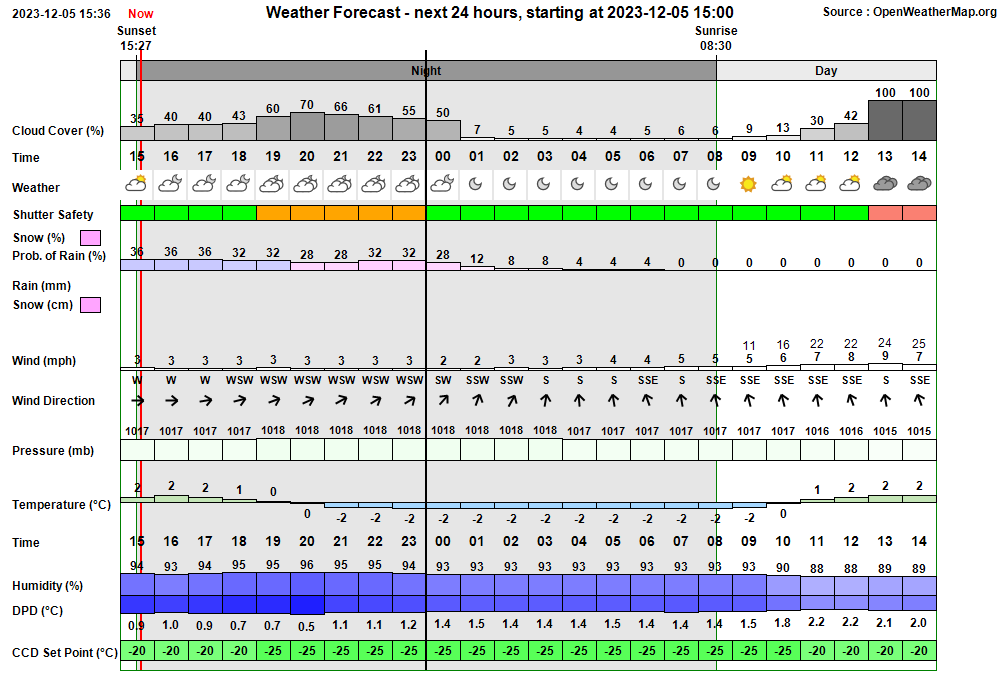
| Actual Weather vs Pre-Session Weather Forecast | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Session Event Log | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Session Alerts & Alarms | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Back to Top
Computer\HKEY_CURRENT_USER\SOFTWARE\Classes\VirtualStore\MACHINE\SOFTWARE\WOW6432Node\SPACE.com\TheSky
TeleAPI-ASCOM Plugin
Observatory Computer AllSky/Weather Computer
Upload
: 6.96 Mbps, 0.87 MB/s 8.40 Mbps,
1.05 MB/s
Download : 9.49 Mbps, 1.19 MB/s
12.70 Mbps, 1.59 MB/s
Average : 8.23 Mbps, 1.03 MB/s
10.55 Mbps, 1.32 MB/s
Observatory Computer AllSky/Weather Computer
Upload
: 2.24 Mbps, 0.28 MB/s 2.01 Mbps,
0.25 MB/s
Download : 4.77 Mbps, 0.60 MB/s
3.76 Mbps, 0.47 MB/s
Average : 3.51 Mbps, 0.44 MB/s
2.89 Mbps, 0.36 MB/s
Observatory Computer AllSky/Weather Computer
Upload
: 8.24 Mbps, 1.03 MB/s 7.13 Mbps,
0.89 MB/s
Download : 13.46 Mbps, 1.68 MB/s 13.74
Mbps, 1.72 MB/s
Average : 10.85 Mbps, 1.36 MB/s
10.43 Mbps, 1.30 MB/s
Dim BuildInfo As FileVersionInfo =
FileVersionInfo.GetVersionInfo(Application.ExecutablePath)Dim BuildInfo As FileVersionInfo =
FileVersionInfo.GetVersionInfo(System.Windows.Forms.Application.ExecutablePath) Conditions: Stars:
51, Clarity: 38.0, Rain: 0, Wind: 1.3 mph, T: -3.2°C, H: 99
(67 characters) Conditions: Stars: 51, Clarity: 38.0,
Rain: 0, Wind: 1.3 mph, T: -3.2°C, H: 99% (68
characters) Conditions: Stars: 0, Clarity: 43.7, Rain: 0, Wind: 2.6
mph, T: 2.3°C, H: 89% (66
characters) window.CurrentConditions = "abcdef Stars: 21, Clarity:
36.2, Rain: 0, Wind: 7.2 mph, T: 3.4°C, H: 99% abcdef"; Conditions: Stars: 21, Clarity: 36.2,
Rain: 0, Wind: 7.2 mph, T: 3.4°C, H: 99%
CurrentConditions Stars: 21, Clarity: 36.2, Rain: 0,
Wind: 7.2 mph, T: 3.4°C, H: 99%
CurrentConditions abcdef Stars: 3, Clarity: 23.3, Rain: 0, Wind: 6.9 mph, T:
3.5degC, H: 99% abcdef Conditions: abcdef Stars: 3, Clarity: 23.3, Rain: 0,
Wind: 6.9 mph, T: 3.5°C, H: 99% abcdef Exception in
'UploadFileFTP2' during PutFiles() for ...
Error: Network
error: Software caused connection abort.
Exception in 'UploadFileFTP2'
during PutFiles() for ...
Error: Session has unexpectedly closed
Exception in 'UploadFileFTP2' during PutFiles() for ...
Error: Element
session@0 already read to the end
' errors repeats for each subsequent
upload attempt
InitialiseFtpQueue() ' Legacy code to
start with an Empty Queue
StartFtpQueue()
StartFtpOverseer()
transferResult = SecureTransfer.PutFiles(SourceFile, DestFile)
Dim session As New Session
Dim sessionOptions As New SessionOptions
Dim transferOptions
As New TransferOptions
{
try
if (doesFileExist(PageName)
== true) {
SessionNotesLink.innerText = PageName;
var a =
document.getElementById("SessionNotesLink");
a.href = PageName;
}
else { SessionNotesLink.innerText = "not available"; }
}
catch
(err) {
SessionNotesLink.innerText = PageName + " (Err)";
var a =
document.getElementById("SessionNotesLink");
a.href = PageName;
}
function
doesFileExist(urlToFile) {
// ------------------------------
var xhr =
new XMLHttpRequest();
xhr.open('HEAD', urlToFile, false);
xhr.send();
if (xhr.status == "404") { // was == "404" return
false; }
else { return true; }
}
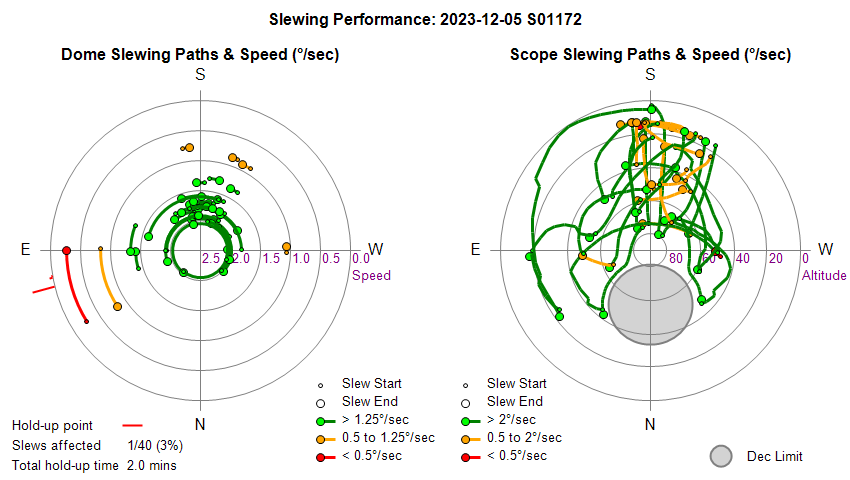
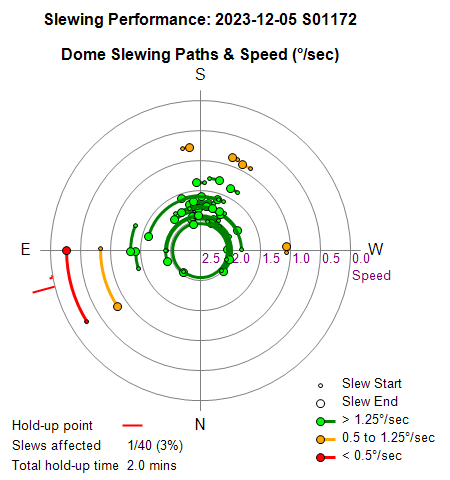
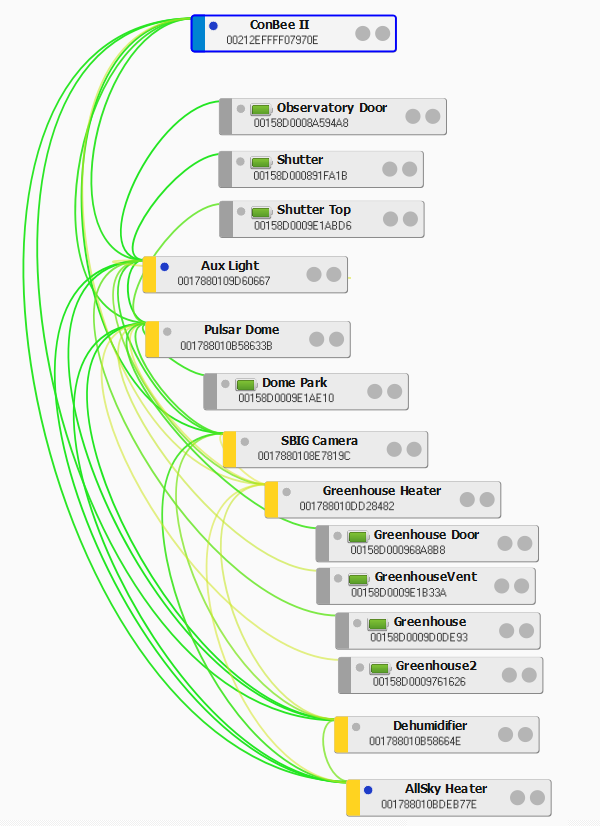
Fig 1. Dome Slewing Performance
Chart for Session S1172.
Back to Top
Issue
a) Holdups occurred slewing to last target and
to Pre-Park (possible holdup at Az 80 or so ?)
b) Last two targets
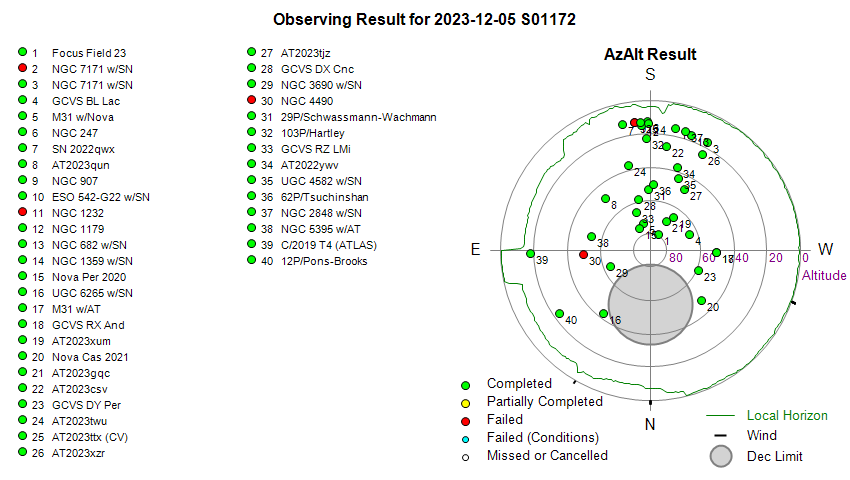
were devoid of stars (sky view occluded by observatory roof)
c) Dome left
at physical azimuth 52° at end of session (38° away from Park Postion)
Description
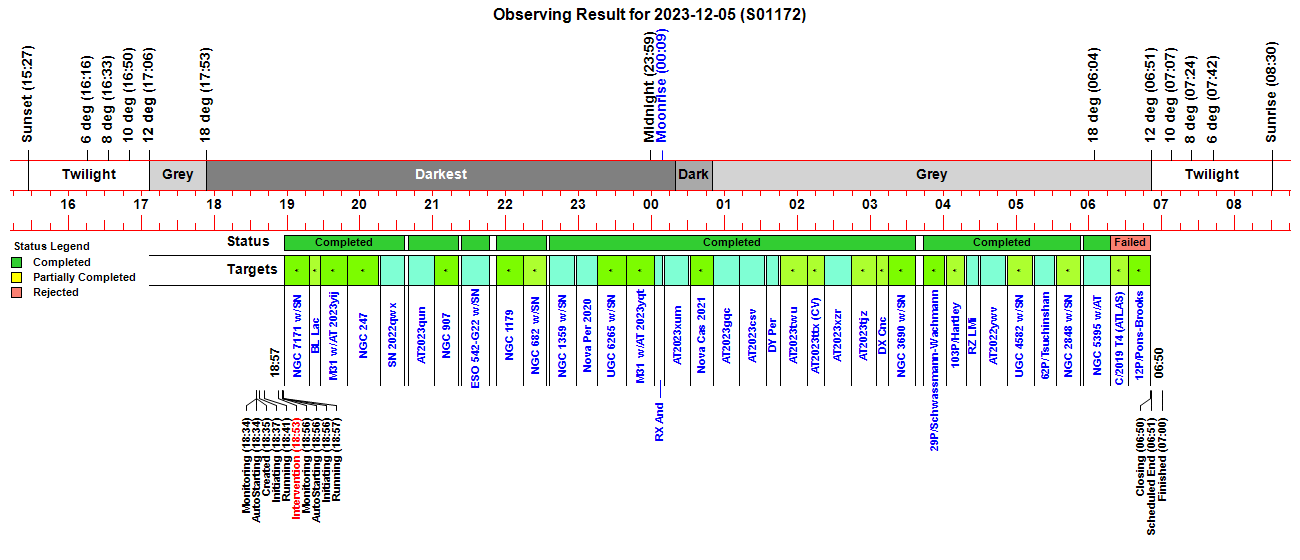
a) For slew to last target (12P/Pons-Brooks) and later on for the slew to Pre-Park position the dome held-up at Az 80°& Az 76° or otherwise stopped moving, for 22s, 99s.
b)The last two targets in the session (C/2019 T4 (Atlas) & 12P/Pons-Brooks) had ocluded sky views which seemed to be due to the dome roof and their images had to be rejected.
c) Dome was left at around physical Az 52° at end of session instead of it's expected Park Position at Az 90° (an error of 38°), even though Dome reported that it had reached and parked at Az 90.1.
Dome Slewing Performance Chart for Session
S1172.
showing issues slewing to 12P/Pons Brooks (orange arc)
and to Pre-Park (red arc)
Issue is serious because images of 12P/Pons-Brooks (a main target for the
session) was unsuccessful.
Issue could have been worse if it had begun
earlier in the session.
The Observatory was visited later in the morning but was unable to establish exactly caused of the problem. There didn't seem to any significant hold-up when the dome was rotated clockwise/anticlockwise. The ends of the rubber trim didn't appear to be catching on anything. The rubber trim is well clear of the wall flanges (which were filed back after the S1169 Session). If there was any catching of the trim it would have been on the SE roof clamp (as this is position of trim ends when Dome is at Az 80) but there was no strong indication of this - the gap seemed sufficient. Dome was rotated to it's physical park position, (where the induction receiver lies next to the induction charger), and then resynced to Az 90 (Park).
Analysis
The questions that need to be
answered are :
The possible hold up point (at Az 80°/Az76°) is around 90° from a 168° hold-up point
that was a major issue in S1169 session ( see
Investigation - Pulsar
Dome holding up at Az 168°, 2023-11-30° ). This might point to a similar
underlying cause ?. When the Observatory
was visited later there didn't seem to any sign of any significant hold-up.
perhaps a wet/slippery roof flange was involved ?.
It can be ruled
out, but overall the data doesn't point to there necessarily being any
physical hold-up that prevented the dome from rotating l(which would have
involved the dome drive wheels spinning on the roof flange for periods of
time).
The data would seem to be most consistent with a
hypothesis that the encoder wheel lost or partially lost tension against the
roof flange and wasn't fully rotating for a period or periods of time near
the end of the session, even though the dome itself was rotating.
Can we prove this or at least demonstrate that it was possible or probably
responsible for the issue.
Looking at the session's last 5 slew operations:
Slewing Details Dome Slew Telescope Slew
Target Time Az1 Az2 Slew Angle Speed Holdup Az1 Az2 Alt1 Alt2 Slew Angle Speed Slew
hh:mm deg deg time deg deg/s time deg deg deg deg time deg deg/s time
NGC 2848 05:33 186.8 195.3 7s 8.5 1.28 187.4 195.8 50.1 15.5 21s 44.3 2.08 21s
NGC 5395 05:55 199.9 105.1 59s 94.8 1.60 201.1 101.8 14.7 52.8 29s 122.6 4.17 59s
C/2019 T4 (ATLAS) 06:17 110.8 89.0 16s 21.8 1.34 107.3 87.1 55.5 17.3 27s 61.4 2.26 27s
12P/Pons-Brooks 06:32 91.2 55.8 43s 35.4 0.83 D* 22s 90.2 54.2 19.3 23.0 24s 51.3 2.15 43s
Pre-Park 06:55 58.1 90.1 121s 32.0 0.27 D* 99s 57.2 180.6 24.9 5.2 36s 170.1 4.69 37s
- Target NGC 5395 had a seemingly normal 94.8° anticlockwise slew from Az
199.9° to Az 105.1° (consistent with slaved coords based on Telescope Slew).
Images show that telescope had a clear view of the sky (i.e. the target was
not occluded by roof) and we can assume that Dome's physical Az matched its
reported Az. By end of this target the dome had moved on to Az 110.8°
whilst slaved to Telescope moving at Sidereal speed.
- Target
C/2019 T4 (Atlas) involved a planned anticlockwise slew from Az 110.8° to
89° and we know that the roof ended up occluding the telescope view of the
sky. It is conjectured that the encoder wheel was slipping during the
slew (causing to to begin underestimate the ture position of the dome), such
that the dome rotation overran the planned physical Az . As slew was
only 16s in length, it is unlikely that the dome over rotated by far (it
couldn't have reached Az 52° - the final physical Az of dome). At a
reasonable maximum speed of 2.0°/s the dome could have ended up at Az
79 (110.8 - 16 x 2.0). At a speed of 1.6°/s (speed of preceeding target) the
dome would have ended up at Az 85°. As the roof fully occluded
the telescope view, it is assumed that that Dome must have ended up at a
physical Az between 79° and 85° (at a speed of 1.34°/s the dome would have
ended up at Az 89° and the roof wouldn't have occluded the sky view). Let
assume that Dome reached Az 82°. The dome seemed to have moved clockwise by
2.2° during the course of the C/2019 T4 (Atlas) ( consistent with the
movement of the scope at sidereal speed_so we will assume that by the end of
target C/2019 T4 (Atlas) the dome lay at Physical Az 80° (from 82 - 2).
- Target 12P/Pons-Brooks was a planned 35.4° anticlockwise slew from Az 91.2° to 55.8° and took 43s with two hold-ups totalling 22s. Again the telescope had an occuled view of the sky. We don't know if the 22s was due to dome drive wheels slipping or due to the encoder wheel not moving. Assuming i) the dome wheels were slipping would imply that Dome ended the slew at physical Az 45 (80-35). If dome had moved 35.4° in 21s (from 43-22) would imply a dome speed when moving of 1.68°/s (from 35.5/21) which is quite feasible. Assuming ii) that the encoder wheel wasn't moving or was slipping, would imply again that the Dome over-rotated. Assuming dome speeds of 1.6°/s to 2.0°/s would imply a physical slew of 68.8° to 86°, and that by the end of slew the Dome was at physical Az 11° (from 80-68.8) to 354° (from 80-86 + 360). During the course of the target the dome seemed to have moved clockwise by 2.3° (consistent with the movement of the scope at sidereal speed). Dome could therefore been a physical Az anywhere between 45° and 354° . Any of these would explain why the roof occluding the telescope's view of the sky/target.
- Pre-Park was a planned 32° clockwise slew from Az 58.1 to Az 90.0 (90.1) and took 121s including a 99s hold-up. Again we don't know if the 99s was due to the dome drive wheels slipping or due to the encoder wheel not moving. Assuming i) the dome wheels were slipping would suggest dome move 32° in 22s which is a 1.45°/s which is quite feasible. As the dome ended at physical Az 52° it might imply that 12P/Pons-Brooks had ended at physical Az 20°, which is in the range estimated. Assuming ii) that the encoder wheel wasn't moving or was slipping would imply that dome had over-rotated. Assuming dome speeds of 1.6°/s to 2.0°/s would imply a physical slew of 193.6° to 242°. As the dome ended at Physical Az 52° it would have required 12P/Pons-Brooks to have ended at physical Az between 170° (52-242+360) and 218° (52-194+360) . This is outside the Dome's estimated physical Dome Az at end of target 12P/Pons-Brooks.
From this it is concluded that it is likely that both of the slews to target C/2019 T4 (Atlas) and target 12P/Pons-Brooks involved slippage or some not rotation of the encoder wheel. The slew to Pre-Park may have involved some slippage of the encoder wheel, but there was almost certainly a physical hold-up in dome rotation (with slippage of dome drive wheels).
Conclusion
In regard to questions
Actions
Back to Top
1) About DomeLink
DomeLink is my second attempt at
building an ASCOM Driver (and my first attempt as building a Dome Driver)
It is intended
to be an ASCOM dome 'driver' that doesn't actually drive dome hardware
itself but is designed instead to sit between Pulsar Dome and DeviceHub.Dome. Except for
forcing the pass back of Slewing=True during the first 1s after sending on a
SlewToAzimuth to the Dome it will do nothing more that pass
communications to and fro between the Pulsar Dome and DeviceHub.Dome.
DomeLink is intended to deliver a workaround for a non-ASCOM compliant
behaviour in Pulsar Dome Observatories driver whereby the Slewing property
doesn't immediately become True after receiving a SlewToAzimuth request, but
is delayed by up to 200ms or so. This doesn't interfere with ASCOM
Conform's Asynchoronous SlewToAzimuth test, probably because of its polling
frequency or methodology, but it does affect DeviceHub's ability to perform
fast-polling during the initial 5s of a dome slew. After sending a
SlewToAzimuth request, DeviceHub looks at the response to Slewing property
and seeing it have the value False considers the Slew as finished and
changes polling rate to a normal 5s rate, then later finding that
slewing=True it then goes to fast polling. The initial slow polling
interfers with AstroMain's monitoring of dome during slewing, and limits the
ability to measure the precise slew time for very short slews (5-6s). Unable
to convince either Pulsar Observatories or Device Hub to make a change it is
proposed to create this intermediary Dome Driver called 'DomeLink'. It would
operate in a manner than is rather similar to how TeleLink works to
workaround a bug in TheSky6/TPoint (TeleLink 1.0
- Telescope Driver, 2022-11-14 ).
2) Creating the DomeLink Project
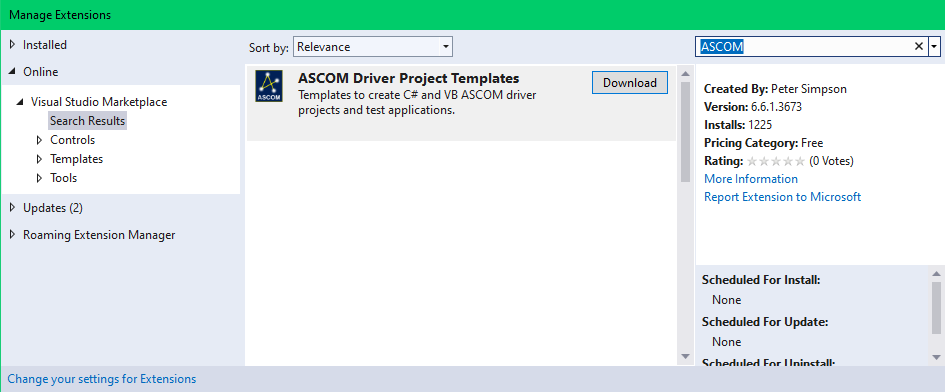
Firstly the
"ASCOM Driver Project Templates" needs to be downloaded /
added as a Visual Studio Extension if not already available. This is done
using Visual Studio's "Extensions/Manage Extensions" menu option
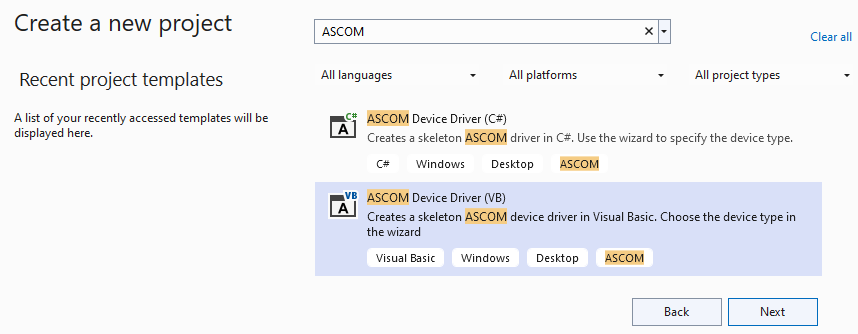
Next a new project solution is created from Visual Studio's "Getting
Started - Create a new project" option, and then filtering on "Visual
Basic / Windows / ASCOM " templates, selecting "ASCOM
Device Driver (VB)"
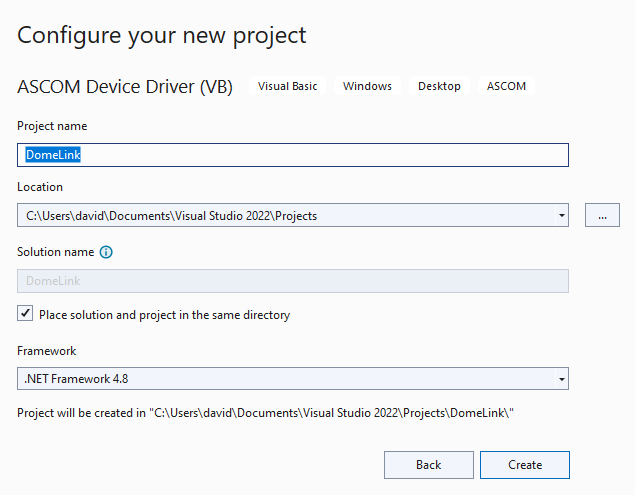
The Next button is then clicked and the "Configure
your new project" form filled in
Clicking 'Create' leads to the "ASCOM Device
Driver Project Wizard" where the driver's Device Class
and Device Name are completed.
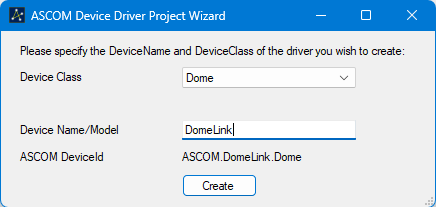
Clicking 'Create' then creates and opens
the project solution in Visual Studio.
3) Developing the Code
The driver's Driver.vb
file (DomeDriver.vb in case of the DomeLink driver) is
then edited & extended to include the required functionality.
The 'SetupDialogForm.vb'
form this edited as required. In the case of the DomeLink driver this
meant the removal of the COM Port (not required as DomeLink is not an
'End-Driver', and the addition of a Dome ID field (for
defining the Dome that DomeLink is connected to)
The principal coding features in DomeLink's DomeDriver.vb file
are as follows:
Customised variables:
' Dome ID
Friend Shared domeIdProfileName As String = "Dome ID"
'More Constants used for Profile persistence
Friend Shared domeIdDefault
As String = "ASCOM.Simulator.Dome"
Friend Shared domeID As String =
"ASCOM.Simulator.Dome"
Private objScope As ASCOM.DriverAccess.Dome
Private SlewToAzimuthTime As Date
A problem initially occured as ASCOM.DriverAccess.Dome wasn't
recognised. This was solved by adding a new Reference to project,
using browse to add in
C:\Program Files (x86)\ASCOM\Platform
6 Developer Components\Components\Platform6\ASCOM.DriverAccess.dll
ASCOM.DriverAccess.dll Customised Connected Property
Public Property Connected() As Boolean Implements
IDomeV2.Connected
' =====================
Get
Dim bIsConnected
bIsConnected = IsConnected
' TL.LogMessage("Connected Get",
bIsConnected.ToString())
Return bIsConnected
End Get
Set(value As Boolean)
TL.LogMessage("Set Connected", value.ToString())
'
Return if scope already connected / already disconnected
' --------------------------------------------------------
If value = IsConnected Then
Return
End If
If value Then
' check DeviceHub is running
'....
' Create Dome
' ------------
TL.LogMessage("Creating objDome", "Setting objDome = New
ASCOM.DriverAccess.Telescope(" + domeID + ")")
objDome = New ASCOM.DriverAccess.Dome(domeID)
' Connect Dome
' -------------
TL.LogMessage("Connect Dome", "Setting objDome.Connected " +
value.ToString())
objDome.Connected =
True
TL.LogMessage("Connect Dome",
"Setting connectedState = True")
connectedState = True
Else
' Disconnect Dome
' ----------------
TL.LogMessage("Disconnect Dome", "Disconnecting from " + domeID)
objDome.Connected = False
TL.LogMessage("Disconnect Dome", "Should now be disconnected from " +
domeID)
' TODO disconnect from the
device
If IsNothing(objDome) = False
Then
TL.LogMessage("Disconnect
Dome", "Disposing objDome")
objDome.Dispose()
objDome =
Nothing
End If
TL.LogMessage("Disconnect Dome", "Setting connectedState = False")
connectedState = False
End If
End Set
End Property
Customised properties and methods which simply pass-on requests and return results, e.g.
Public ReadOnly Property ShutterStatus() As ShutterState Implements
IDomeV2.ShutterStatus
'======================================
Get
Return objDome.ShutterStatus
End Get
End Property
Public Property Slaved() As
Boolean Implements IDomeV2.Slaved
'======================
Get
Return objDome.Slaved
End Get
Set(value As Boolean)
objDome.Slaved = value
End Set
End Property
Public Sub
SyncToAzimuth(Azimuth As Double) Implements IDomeV2.SyncToAzimuth
'=======================
objDome.SyncToAzimuth(Azimuth)
End Sub
Key Customised Methods which fix issue with Slewing Value
Public Sub SlewToAzimuth(Azimuth As Double) Implements
IDomeV2.SlewToAzimuth
'=======================
objDome.SlewToAzimuth(Azimuth)
SlewToAzimuthTime = Now()
End
Sub
Public ReadOnly Property Slewing() As Boolean
Implements IDomeV2.Slewing
'=================================
Get
' Special Handling
'
----------------
If
Now().Subtract(SlewToAzimuthTime).TotalSeconds < 1.0 Then
Return True ' return True to workaround small bug in Pulsar Dome
driver that can
' initially return False following call to SlewToAzmiuth
Else
Return objDome.Slewing
End If
End Get
End Property
4) Driver Installation
To install the new driver a setup file needs to be created using the
'Inno Setup' Program (accessed from "Start/ASCOM Platform 6/Developer
Tools/Inno Installer Web Site" or direct from
https://jrsoftware.org/isinfo.php to install latest stable version 6.2.1
as at 2022-11-12) and a script file that is built by running
"Start/ASCOM Platform 6/Developer Tools/Driver Install Script Generator" .
Picture below is for TeleLink - picture needs to be replaced by one
specific to DomeLink.
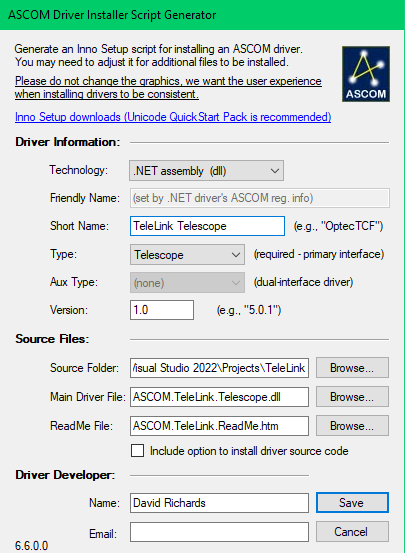
After filling in the relevant details and clicking Save a script file ("DomeLink
Dome Setup.iss) is then generated.
Inno
Setup is then run and the script file selected, or the .iss file
can be simply clicked upon. This is then checked and Built /
Run to generate a setup file (DomeLink Dome Setup.exe) which can be either
immediately lauched, or launched later, in order to register the
driver in ASCOM and in Windows.
The Setup.exe file can also be copied
to the Observatory Computer, where it can launched in order to install the
driver on the Observatory Computer.
When the Setup.exe is run is
copies the driver DLL file to "C:\Program Files (x86)Common
Files\ASCOM\Dome\" folder and an entry is created in ASCOM
Profile Root\Dome Drivers (viewable via Profile Explorer).
5) Driver Set-Up & Use
From the
DeviceHub Dome Setup' chose 'DomeLink Dome' as Dome and
click on Properties.
(Note Dome Geometry settings will be preserved)
Then click on Settings to get to
'ASCOM Dome Chooser' form and select "DomeLink
Dome".
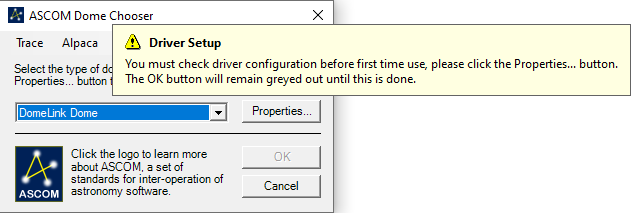
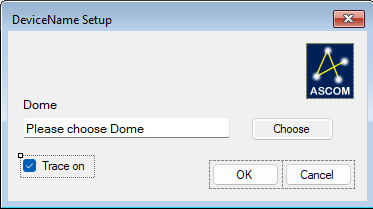
The DomeLink settings must now be setup. A dialog appears to
ensure that the DomeLink configuration is checked/set before first time
use.
Click on Properties to get to the DomeLink Setup' form.
Choose 'ASCOM.Pulsar_Observatories_Dome.Dome' and
optionally turn on Trace :
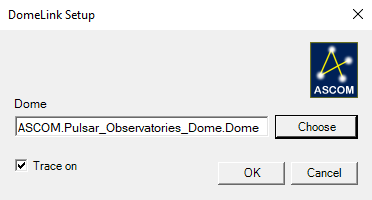
Note : On Development Computer (or if running Sim Dome'
on Observatory Computer) choose ASCOM.Simulator.Dome.
Clicking on OK returns to Device Hub Dome Setup :
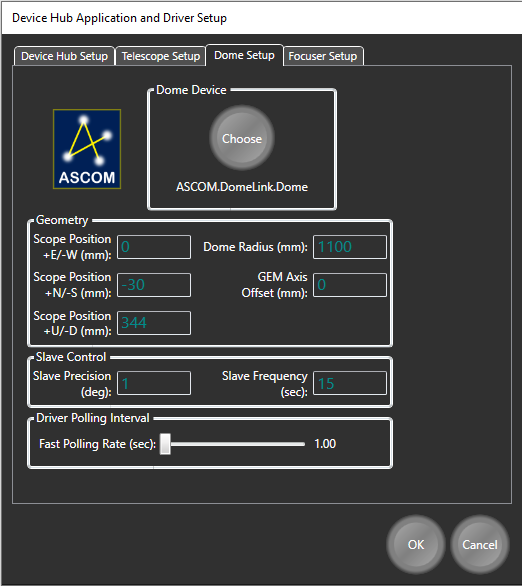
Ok is then clicked on the various forms to save the setup.
6) Progress
The first working version (my first ever ASCOM driver) was developed in a matter of just a few hours. DomeLink 1.0 was released on 2023-12-07 and installed on Observatory Computer ready for its first live session test.
Tests show that it is allowing DeviceHub to operate on Fast-Polling for
the entire slew, showing that DomeLink successfully works around the issue
that Pulsar Dome causes by carrying Slewing=False for the first 200ms or so
following reciept of a SlewToAzimuth request.
Looking at DeviceHub's
activity log for a slew from Az 90° to Az 110° we can see in the existing
environment involving a direct connection to 'Pulsar Observatories Dome' (test
a), DeviceHub.Dome sees Slewing = False at 21:56:01.323 and
switches to polling every 5000 ms, before it switches to 1000 ms polling
(this is not logged) when it sees Slewing=True at 21:56:06. The causes
an absence of any fresh Azimuth information arriving back at the end client
between Az 90° and Az 100.3°. The entire 20° slew is defined by
only 8 points.
Test a) DeviceHub Activity Log for Slew from
90 to 110 with direct connection to Pulsar Observatories Dome
21:56:01.320: Dome - Commands: SlewToAzimuth (110.00000°):
(slew started)
21:56:01.320: Dome - Statuses: Get Azimuth: 90
21:56:01.320: Dome - Statuses: Get Slewing: False
21:56:01.322: Dome -
Commands: Started fast polling every 1000 ms.
21:56:01.323: Dome -
Statuses: Get Azimuth: 90
21:56:01.323: Dome - Statuses: Get Slewing:
False
21:56:01.323: Dome - Commands: Returning to normal polling
every 5000 ms.
21:56:06.329: Dome - Statuses: Get Azimuth: 100.3
21:56:06.329: Dome - Statuses: Get Slewing: True
21:56:07.328: Dome -
Statuses: Get Azimuth: 102.4
21:56:07.328: Dome - Statuses: Get Slewing:
True
21:56:08.328: Dome - Statuses: Get Azimuth: 104.6
21:56:08.328:
Dome - Statuses: Get Slewing: True
21:56:09.328: Dome - Statuses: Get
Azimuth: 106.9
21:56:09.328: Dome - Statuses: Get Slewing: True
21:56:10.329: Dome - Statuses: Get Azimuth: 109.2
21:56:10.329: Dome -
Statuses: Get Slewing: True
21:56:11.328: Dome - Statuses: Get Azimuth:
109.8
21:56:11.328: Dome - Statuses: Get Slewing: True
21:56:12.345:
Dome - Statuses: Get Azimuth: 110
21:56:12.345: Dome - Statuses: Get
Slewing: False
21:56:16.344: Dome - Statuses: Get Azimuth: 110
21:56:16.344: Dome - Statuses: Get Slewing: False
21:56:16.344: Dome -
Commands: Returning to normal polling every 5000 ms.
If we compare this with the new enviroment involving an indirect connection to ''Pulsar Observatories Dome' using DomeLink as an intermediary driver (test b) DeviceHub.Dome sees Slewing = True and remains on fast polling every 1000ms for the entire slew, this means fresh azimuth data can arrrive with the end client (AstroMain) for every second of the slew (including the first 5s). The entire 20° slew is now defined by 12 point. The new environment means that the actual time to make short slews (less than 5s) can now be recorded by AstroMain.
Test b) DeviceHub Activity Log for Slew from
90 to 110 with indirect connection to Pulsar Observatories Dome via new
DomeLink driver.
22:05:32.623: Dome - Commands: SlewToAzimuth
(110.00000°): (slew started)
22:05:32.623: Dome - Statuses: Get Azimuth:
90
22:05:32.623: Dome - Statuses: Get Slewing: True
22:05:32.623: Dome
- Commands: Started fast polling every 1000 ms.
22:05:32.623: Dome -
Statuses: Get Azimuth: 90
22:05:32.623: Dome - Statuses: Get Slewing:
True
22:05:32.624: Dome - Statuses: Get Azimuth: 90
22:05:32.624: Dome
- Statuses: Get Slewing: True
22:05:33.635: Dome - Statuses: Get Azimuth:
90.7
22:05:33.635: Dome - Statuses: Get Slewing: True
22:05:34.639:
Dome - Statuses: Get Azimuth: 92.9
22:05:34.639: Dome - Statuses: Get
Slewing: True
22:05:35.636: Dome - Statuses: Get Azimuth: 95.5
22:05:35.636: Dome - Statuses: Get Slewing: True
22:05:36.643: Dome -
Statuses: Get Azimuth: 97.4
22:05:36.644: Dome - Statuses: Get Slewing:
True
22:05:37.650: Dome - Statuses: Get Azimuth: 99.8
22:05:37.650:
Dome - Statuses: Get Slewing: True
22:05:38.635: Dome - Statuses: Get
Azimuth: 102.1
22:05:38.635: Dome - Statuses: Get Slewing: True
22:05:39.639: Dome - Statuses: Get Azimuth: 104.7
22:05:39.640: Dome -
Statuses: Get Slewing: True
22:05:40.635: Dome - Statuses: Get Azimuth:
106.8
22:05:40.635: Dome - Statuses: Get Slewing: True
22:05:41.634:
Dome - Statuses: Get Azimuth: 109.1
22:05:41.635: Dome - Statuses: Get
Slewing: True
22:05:42.634: Dome - Statuses: Get Azimuth: 109.8
22:05:42.634: Dome - Statuses: Get Slewing: True
22:05:43.633: Dome -
Statuses: Get Azimuth: 110
22:05:43.634: Dome - Statuses: Get Slewing:
False
22:05:47.648: Dome - Commands: Returning to normal polling every
5000 ms.
DomeLink produces the following log file for the same slew (file was made on a subsequent day.
01:17:15.691 Creating objDome Setting objDome = New
ASCOM.DriverAccess.Telescope(ASCOM.Pulsar_Observatories_Dome.Dome)
01:17:15.726 Connect Dome Setting objDome.Connected True
01:17:15.873
Connect Dome Setting connectedState = True
01:18:21.437 SlewToAzimuth
SlewToAzimuth(110.0)
01:18:21.452 Azimuth Get Azimuth = 90.0
01:18:21.452 Slewing Get True (Slewing forced to True for 500ms after
calling SlewToAzimuth()
01:18:21.452 Azimuth Get Azimuth = 90.0
01:18:21.452 Slewing Get True (Slewing forced to True for 500ms after
calling SlewToAzimuth()
01:18:21.453 Azimuth Get Azimuth = 90.0
01:18:21.453 Slewing Get True (Slewing forced to True for 500ms after
calling SlewToAzimuth()
01:18:22.460 Azimuth Get Azimuth = 90.0
01:18:22.460 Slewing Get True
01:18:23.467 Azimuth Get Azimuth = 92.0
01:18:23.467 Slewing Get True
01:18:24.477 Azimuth Get Azimuth = 94.3
01:18:24.478 Slewing Get True
01:18:25.462 Azimuth Get Azimuth = 96.5
01:18:25.462 Slewing Get True
01:18:26.460 Azimuth Get Azimuth = 99.2
01:18:26.460 Slewing Get True
01:18:27.461 Azimuth Get Azimuth = 101.3
01:18:27.461 Slewing Get True
01:18:28.475 Azimuth Get Azimuth = 103.6
01:18:28.475 Slewing Get True
01:18:29.476 Azimuth Get Azimuth = 105.9
01:18:29.476 Slewing Get True
01:18:30.479 Azimuth Get Azimuth = 108.3
01:18:30.479 Slewing Get True
01:18:31.476 Azimuth Get Azimuth = 109.7
01:18:31.476 Slewing Get True
01:18:32.476 Azimuth Get Azimuth = 110.0
01:18:32.476 Slewing Get False
Update 2023-12-17
The DomeLink driver was successfully used during the S1173 live session on 2023-12-16, and also on the 5 following session between 2023-12-17 & 2023-12-29 (S1174 -1178).
Update 2024-01-05
A new ASCOM Driver (6.4, dated 2024-01-04) for the Pulsar Dome was
installed on the Observatory Computer on 2024-01-05, and was confirmed to
have addressed the issue with earlier 6.3 versions of the driver. The new
driver correctly returns Slewing=True immediately
after making a SlewToAzimuth() request. This makes the Pulsar System ASCOM
compliant or at least behave in the manner expected by an ASCOM Dome Client.
(See
Pulsar Dome -
Software Update (Firmware 1.52 & ASCOM Driver 6.4), 2024-01-05 )
Back to Top
The Observatory's Pulsar Dome will sometimes fail to park the dome at the end of a session at the precise point for Induction Charger to recharge the Shutter battery. This can happen even after a recalibration of the dome. When this means that Observatory has to be visited the following morning and the dome nudged under manual control so that the two halves of the induction charger at visually aligned. Whether the Shutter is charging or not following a Park operation can be gleaned from the Pulsar Dome's ASCOM driver log and historically this is protrayed on Observatory Status Webpage (see Shutter Battery Graphs). Code has recently been added to AstroMain to raise alerts when recharging does commence after parking the dome. This is useful but doesn't preclude the need to visit the Observatory to nudge the Dome.
A new routine 'SearchForBestParkPosition()' has been been developed that
searches across a range in azimuth (90° +/- 5°, step 0.5°) to find positions
where charging occurs and then uses the Azimuth with highest charge rate to
slew the dome to that position. This routine takes around 45 minutes
to run due to the need to wait up to 140s at each Azimuth point to get fresh
Shutter Battery information (the Dome Controller seems to poll the Shutter
every 135s). The routine is also only efffective when the
Shutter Battery is slightly depleted (which is normal after a session), it
may not work when the Shutter is fully charged and charging pulse only
happens every 15 mins of so.
In theory the Dome can be asked to Find
Home (180°) and then move to Park Position (90°), in practice this can't be
used as the dome's Home Magnet is not be left permanently in place because
it quickly corrodes and looses magnetic strength, and therefore taken out
when not running a Dome Calibration.
It was decided to add a 'At
Park' Sensor that could independantly used to find the optimal Park
Position, with the idea that it could be run via a Remote VNC Connection
(avoiding the need to visit the Observatory) or could be run automatically
at the end of the session (avoiding the need for any user intervention at
all). The idea was that the Open/Close State of the sensor could be used as
a proxy for AtPark (Parked) State with Open=Unparked, Closed=Parked.
It was believed that the Sensor Element could be attached to the top of one
of the dome's roof clamps (stationary) with the magnet element attached to
the roof (ie it rotates with the dome), and that this could be done without
interferring with the rotation and use of the dome.
A new Zigbee Sensor of the same type as
previously used for Observatory Door and Shutter Top/Bottom and Greenhouse
Vent (Aqara MCCGQ11LM Door & Window
Sensor,
https://www.amazon.co.uk/Aqara-MCCGQ11LM-Door-Window-Sensor/dp/B07D37VDM3)
was ordered and it arrived the following day (2023-12-12).
Sensor Installation, Zigbee (2023-12-12)
The new
sensor was installed on the observatory's zigbee network (AstroGW) on
2023-12-12, using Phoscon from the deCONZ Application.
The sensor properties record type=ZHAOpenClose, manufacturer=LUMI,
modelid=lumi.sensor_magnet.aq, swversion 20161128, and took sensor id = 21.
A Zigbee Sensor of the same type for Greenhouse Door, sensor id = 20 was
installed at the same time. A Network Diagram showing
Observatory's Zigbee Network after the addition of the two new sensors.
AstroMain 3.65.5 was updated to access and utilise the state of the new
'AtPark' Sensor and successfully tested.
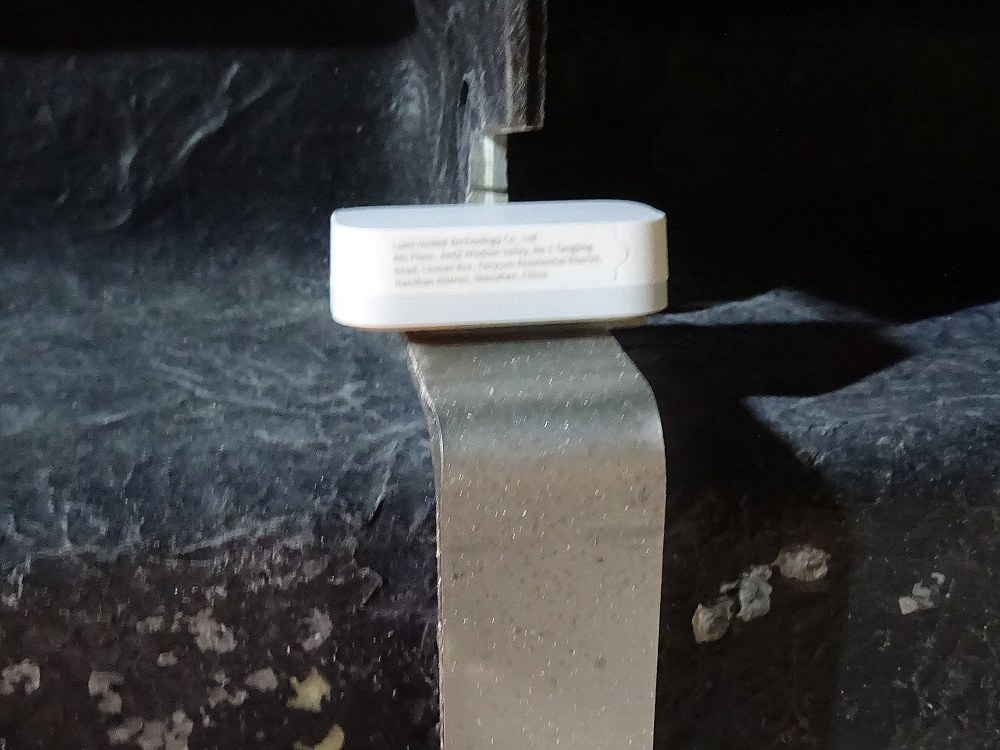
Sensor Installation, Observatory (2023-12-13)
The Sensor
was installed in the Observatory the following day (2023-12-13). With
the Dome at its correct physical Park Location (Az 90), the sensor element
was attached to the SW Roof Clamp and the associated magnet element attached
to the top surface of the roof flange in a position directly opposite the
sensor. The magent element was raised up on a small piece of wood so
that it was at the same height as the sensor element. The Dome was
then rotated to check for any interference from the new sensor or other
issue
Find Park / SearchForBestParkPosition Routine
The
SearchForBestParkPosition() routine was modified to use the 'AtPark'
(Parked) state of the new AtPark Sensor. As the process is a lost
faster than earlier method looking at the amperage in mA going to the
Shutter Battery, a step size of 0.2° or 0.1° can easily be used.
The
routine searches for the first and last azimuth with 'AtPark' = True and
then take the midpoint of this 'AtPark Range' as the Best Park Azimuth.
The routine was successful in finding correct Park Position
taking 2.3
minutes. The detailed results were surprising however. Instead of a single
and hopefully fairly narrow 'At Park' zone, the routine detected three
'AtPark' zones with 'UnParked zones in between, such that the overall 'At
Park Zone' was 3.8° wide. It is supposed that the Sensor which
is designed to sense the magnet coming directly toward the sensor (a normal
Open-Closed situation) isn't designed or intended for a situation where the
magnet slides past the sensor.
Search for Optimal Park Position 2023-12-13 19:24 (Local, GMT)
Search Angle Info Search 90.0° +/- 4°, Step 0.2°
Jog Dome (85.0°) Ok Az: 85.0°
Jog Dome (85.2°) Ok Az: 85.2°
Jog Dome (85.4°) Ok Az: 85.4°
Jog Dome (85.6°) Ok Az: 85.6°
Jog Dome (85.8°) Ok Az: 85.8°
Jog Dome (86.0°) Ok Az: 86.0°
Jog Dome (86.2°) Ok Az: 86.2°
Jog Dome (86.4°) Ok Az: 86.4°
Jog Dome (86.6°) Ok Az: 86.6°
Jog Dome (86.8°) Ok Az: 86.8°
Jog Dome (87.0°) Ok Az: 87.0°
Jog Dome (87.2°) Ok Az: 87.2°
Jog Dome (87.4°) Ok Az: 87.4°
Jog Dome (87.6°) Ok Az: 87.6°
Jog Dome (87.8°) Ok Az: 87.8°
Jog Dome (88.0°) Ok Az: 88.0°
Jog Dome (88.2°) Ok Az: 88.2°
Jog Dome (88.4°) Ok Az: 88.4°, AtPark
Jog Dome (88.6°) Ok Az: 88.6°, AtPark
Jog Dome (88.8°) Ok Az: 88.8°, AtPark
Jog Dome (89.0°) Ok Az: 89.0°, AtPark
Jog Dome (89.2°) Ok Az: 89.2°, AtPark
Jog Dome (89.4°) Ok Az: 89.4°
Jog Dome (89.6°) Ok Az: 89.6°
Jog Dome (89.8°) Ok Az: 89.8°, AtPark
Jog Dome (90.0°) Ok Az: 90.0°, AtPark
Jog Dome (90.2°) Ok Az: 90.2°, AtPark
Jog Dome (90.4°) Ok Az: 90.4°, AtPark
Jog Dome (90.6°) Ok Az: 90.6°, AtPark
Jog Dome (90.8°) Ok Az: 90.8°, AtPark
Jog Dome (91.0°) Ok Az: 91.0°
Jog Dome (91.2°) Ok Az: 91.2°
Jog Dome (91.4°) Ok Az: 91.4°, AtPark
Jog Dome (91.6°) Ok Az: 91.6°, AtPark
Jog Dome (91.8°) Ok Az: 91.8°, AtPark
Jog Dome (92.0°) Ok Az: 92.0°, AtPark
Jog Dome (92.2°) Ok Az: 92.2°, AtPark
Jog Dome (92.4°) Ok Az: 92.4°
Jog Dome (92.6°) Ok Az: 92.6°
Jog Dome (92.8°) Ok Az: 92.8°
Jog Dome (93.0°) Ok Az: 93.0°
Jog Dome (93.2°) Ok Az: 93.2°
Jog Dome (93.4°) Ok Az: 93.4°
Jog Dome (93.6°) Ok Az: 93.6°
Jog Dome (93.8°) Ok Az: 93.8°
Jog Dome (94.0°) Ok Az: 94.0°
Best Park Position Ok Best Park at Az 90.3° (range 88.4 - 92.20°, park width 3.8°
Slew To Best Park Az.. Ok Az: 90.3°
Whilst the routine finds Best Park Positon ok, the wide 'At Park' Zone
(3.8°) with two intervening 'Unparked' zones, means that the sensor
would act as a good independant indicator of the park status of the dome.
With Dome positioned +1.9° or -1.9° away from Park would show 'AtPark' but
the Induction Charger alignement wouldn't allowing charging of the
Shutter battery.
It is proposed to trial the Magnet Element so
that it is orientated perpendicular to the Sensor Element instead of
parallel.
Update 2023-12-14
Trial conducted with long axis of
Magnet Element oriented perpendicular to the Sensor Element, with a Step
Size of 0.2°. This showed a smaller 'At Park' Zone of 3.0° instead of
3.8°, but again had a strange profile. In detail there were two
AtPark zones separated by a narrow 'Unparked' zone.
Search for Optimal Park Position 2023-12-14 13:37 (Local, GMT)
Search Angle Info Search 90.0° +/- 3°, Step 0.2°
Jog Dome (87.0°) Ok Az: 87.0°
Jog Dome (87.2°) Ok Az: 87.2°
Jog Dome (87.4°) Ok Az: 87.4°
Jog Dome (87.6°) Ok Az: 87.6°
Jog Dome (87.8°) Ok Az: 87.8°
Jog Dome (88.0°) Ok Az: 88.0°
Jog Dome (88.2°) Ok Az: 88.2°
Jog Dome (88.4°) Ok Az: 88.4°
Jog Dome (88.6°) Ok Az: 88.6°, AtPark
Jog Dome (88.8°) Ok Az: 88.8°, AtPark
Jog Dome (89.0°) Ok Az: 89.0°, AtPark
Jog Dome (89.2°) Ok Az: 89.2°, AtPark
Jog Dome (89.4°) Ok Az: 89.4°, AtPark
Jog Dome (89.6°) Ok Az: 89.6°, AtPark
Jog Dome (89.8°) Ok Az: 89.8°, AtPark
Jog Dome (90.0°) Ok Az: 90.0°, AtPark
Jog Dome (90.2°) Ok Az: 90.2°
Jog Dome (90.4°) Ok Az: 90.4°, AtPark
Jog Dome (90.6°) Ok Az: 90.6°, AtPark
Jog Dome (90.8°) Ok Az: 90.8°, AtPark
Jog Dome (91.0°) Ok Az: 91.0°, AtPark
Jog Dome (91.2°) Ok Az: 91.2°, AtPark
Jog Dome (91.4°) Ok Az: 91.4°, AtPark
Jog Dome (91.6°) Ok Az: 91.6°, AtPark
Jog Dome (91.8°) Ok Az: 91.8°
Jog Dome (92.0°) Ok Az: 92.0°
Jog Dome (92.2°) Ok Az: 92.2°
Jog Dome (92.4°) Ok Az: 92.4°
Jog Dome (92.6°) Ok Az: 92.6°
Jog Dome (92.8°) Ok Az: 92.8°
Jog Dome (93.0°) Ok Az: 93.0°
Best Park Position 2023-12-14 13:39 (Local, GMT)
Best Park Position Ok Best Park at Az 90.1° (range 88.6 - 91.60°, park width 3.0°
Slew To Best Park Az.. Ok Az: 90.1°
The Search
run was repeated using a smaller step size of 0.1° but showed a similar
result with a narrow unparked zone. Although the Best Park Position is
suitable for finding the best Park Position for the Dome, this configuration
has the issue that with the dome at the determined best park position the
AtPark Sensor shows the dome as being Unparked, which would limit the use of
the sensor to finding AtPark . It can't be used as an independant indicator
of the Park Status of the dome. Increasing the separation between the
Magnetic and Sensor Elements produced no change to this two zone pattern or
was too far away to see any At Park Zone.
Jog Dome (88.0°) Ok Az: 88.0°
Jog Dome (88.2°) Ok Az: 88.2°
Jog Dome (88.4°) Ok Az: 88.4°
Jog Dome (88.6°) Ok Az: 88.6°, AtPark
Jog Dome (88.8°) Ok Az: 88.8°, AtPark
Jog Dome (89.0°) Ok Az: 89.0°, AtPark
Jog Dome (89.2°) Ok Az: 89.2°, AtPark
Jog Dome (89.4°) Ok Az: 89.4°, AtPark
Jog Dome (89.6°) Ok Az: 89.6°, AtPark
Jog Dome (89.8°) Ok Az: 89.8°, AtPark
Jog Dome (90.0°) Ok Az: 90.0°
Jog Dome (90.2°) Ok Az: 90.2°
Jog Dome (90.4°) Ok Az: 90.4°, AtPark
Jog Dome (90.6°) Ok Az: 90.6°, AtPark
Jog Dome (90.8°) Ok Az: 90.8°, AtPark
Jog Dome (91.0°) Ok Az: 91.0°, AtPark
Jog Dome (91.2°) Ok Az: 91.2°, AtPark
Jog Dome (91.4°) Ok Az: 91.4°, AtPark
Jog Dome (91.6°) Ok Az: 91.6°
Jog Dome (91.8°) Ok Az: 91.8°
Jog Dome (92.0°) Ok Az: 92.0°
Best Park Position 2023-12-14 13:47 (Local, GMT)
Best Park Position Ok Best Park at Az 90.0° (range 88.6 - 91.40°, park width 2.8°
Slew To Best Park Az.. Ok Az: 90.0°
The position of the Magnetic Element was changed back to being parallel to
the Sensor Element, and a series of experienents conducted changing the
separation distance. Increasing the separation it was found that the
original triple 'AtPark' zone profile with intervening unparked zones was
replaced by a single 'AtPark' zone profile, and at the same time the width
of overall 'AtPark' zone reduced from 3.8° to 1.2°.
Search for Optimal Park Position 2023-12-14 14:06 (Local, GMT)
Search Angle Info Search 90.0° +/- 3°, Step 0.2°
Jog Dome (87.0°) Ok Az: 87.0°
Jog Dome (87.2°) Ok Az: 87.2°
Jog Dome (87.4°) Ok Az: 87.4°
Jog Dome (87.6°) Ok Az: 87.6°
Jog Dome (87.8°) Ok Az: 87.8°
Jog Dome (88.0°) Ok Az: 88.0°
Jog Dome (88.2°) Ok Az: 88.2°
Jog Dome (88.4°) Ok Az: 88.4°
Jog Dome (88.6°) Ok Az: 88.6°
Jog Dome (88.8°) Ok Az: 88.8°
Jog Dome (89.0°) Ok Az: 89.0°
Jog Dome (89.2°) Ok Az: 89.2°
Jog Dome (89.4°) Ok Az: 89.4°
Jog Dome (89.6°) Ok Az: 89.6°, AtPark
Jog Dome (89.8°) Ok Az: 89.8°, AtPark
Jog Dome (90.0°) Ok Az: 90.0°, AtPark
Jog Dome (90.2°) Ok Az: 90.2°, AtPark
Jog Dome (90.4°) Ok Az: 90.4°, AtPark
Jog Dome (90.6°) Ok Az: 90.6°, AtPark
Jog Dome (90.8°) Ok Az: 90.8°
Jog Dome (91.0°) Ok Az: 91.0°
Jog Dome (91.2°) Ok Az: 91.2°
Jog Dome (91.4°) Ok Az: 91.4°
Jog Dome (91.6°) Ok Az: 91.6°
Jog Dome (91.8°) Ok Az: 91.8°
Jog Dome (92.0°) Ok Az: 92.0°
Jog Dome (92.2°) Ok Az: 92.2°
Jog Dome (92.4°) Ok Az: 92.4°
Jog Dome (92.6°) Ok Az: 92.6°
Jog Dome (92.8°) Ok Az: 92.8°
Jog Dome (93.0°) Ok Az: 93.0°
Best Park Position 2023-12-14 14:08 (Local, GMT)
Best Park Position Ok Best Park at Az 90.1° (range 89.6 - 90.60°, park width 1.0°
Slew To Best Park Az.. Ok Az: 90.1°
Whilst this produced better results, the slew to best park position didn't take align the Induction Charger perfectly - it was out by 0.2° of so. This was resolved by adjusting the position of the Magnetic Element slightly to the right of centre. The final configuration of the Sensor parts is shown below (right).
With the speed that the Zigbee Events are generated and picked up by the
AstroMain, it might theoretically be possible to slew directly across the
search range and detect 'AtPark' True/False changes on the fly. This might
run into an issue if the thread doesn't recieve sufficient CPU time to
constantly interrogate the 'AtPark Sensor' state. But a greater problem is
that with the dome slewing at
up to 2°/s , a 0.2° change in Az would therefore take place in just 0.1s, but DeviceHub.Dome
which is used in the communication with the Dome (via Pulsar Dome Driver)
can only poll the dome every 1 to 1.3s (shortest possible time when on fast
polling), so measuring an accurate 'AtPark' profile isn't feasible.
The best that could be done is to measure the fairly infrequent Azimith
values and then perform a linear interpolation to derive inferred azimuth
values at the times when AtPark state changes occur. This could only be done
on completion of the whole slew. Despite these limitations the
approach might be suitable for a wide search range to get an approximate
position for AtPark azimuth, and then follow it up with a step based search
on a much narrower range (say +/-4°).
Back to Top
A new Zigbee Sensor of the same type as
previously used for Greenhouse Roof Vent (Aqara MCCGQ11LM Door & Window
Sensor,
https://www.amazon.co.uk/Aqara-MCCGQ11LM-Door-Window-Sensor/dp/B07D37VDM3)
was ordered and it arrived the following day (2023-12-12). It will
be used for monitoring the Open/Closed status of the Greenhouse Door.
Sensor Installation, Zigbee (2023-12-12)
The new
sensor was installed on the observatory's zigbee network (AstroGW) on
2023-12-12, using Phoscon from the deCONZ Application.
The sensor properties record type=ZHAOpenClose, manufacturer=LUMI,
modelid=lumi.sensor_magnet.aq, swversion 20161128, and the sensor took
sensor id = 20. A Zigbee Sensor of the same type was installed a the
same time to act as an
Observatory 'AtPark' Indicator.
AstroMain 3.65.5 was
updated to access and utilise the state of the new 'Greenhouse Door' Sensor
and successfully tested.
Sensor Installation, Greenhouse (2023-12-13)
The Sensor was
installed on the inside of the Greenhouse Door the following day (2023-12-13).
The state of the Observatory Door is shown on the AstroMain's
More/Greenhouse tab and on the
Greenhouse Virtual Picture that is updated every 30s and posted to the Observatory
Website.
Back to ref="#Top">TopTop
After a fairly continuous spell of wet weather water it was noted on around
2023-12-10 or 11 that the
observatory floor mat was wet and there were signs of water
coming up between the joins on some of the interlocking rubber floor tiles.
The floor mat and interlocking tiles were lifted a couple of days
later during a break in the weather (2023-12-13). Picture below show
the distributuon of the water ingress. The floor is wet in E (bottom) SE, E
(left) and SW directions (top-left). It's hard to tell whether the water
has come in from one or two places and then spread out or it has come
in along wider sections of the wall. The N (right) and NW (top-right
direction are mostly dry and the area around the pier is notably dry.

With the tiles lifted, the floor proceeded to dry out over the next 18
hours of at least by the time the Observatory was
checked the following day (2023-12-14).
The graphs below show
the extent of wet weather over the last week. Every day has had rain, with
the
heaviest and most prolonged rain being on Dec 7th-8th.
This problem of water ingress has been seen before after certain spells
of wet weather and is due to
seepage of water from below the observatory wall and/or coming up the bolt
holes associated with bolts that hold down the observatory.
With the
outside circumference of the Observatory's Concrete pad being almost
continously wet/damp in winter and with water/damp still present below the
Observatory walls a remedial fix isn't possible at this time.
Replacemen of the silicone seal around the walls will have to wait till
until next spring/summer next
year during a suitably dry spell.
Back to Top
Issue
Description
1) LAN Connection to Observatory went down, stopping Uploads to Observatory Computers and stopping remote access & window explorer access (2023-12-09). Uploading of fresh data to Observatory Website from both the Observatory Computer and the AllSky/Weather Computer stopped at around 16:45 on 2023-12-09. At the same time and for the remainder of the evening the Development Computer lost LAN Network access to both computers, and it wasn't possible to make a VNC Connection to either computer. Observatory was visited and a power reset of the Ethernet Over Powerline plug was made which resolved both issues. LAN connection wouldn't come back by itself. Issue couldn't be resolved by restarting the Ethernet Over Powerline plug at the house/router end. Issue resolved by visiting the Observatory to restart the Observatories Ethernet Over Powerline plug. Whilst the LAN was down Observatory Computer and AllSky/Weather Computer seemed to continue TCP/IP communication as they use a command Network Switch unit. Upload of fresh data to Website from both computers didn't automatically restart and AstroPlan & AstroAllSky (containing the web uploaders for the two computers) had to be manually restarted. A LAN Connection issue also happened the following evening (2023-12-10) however it restored itself in 10 minutes. It is possible power reset of the 'Ethernet Over Powerline' plug near the router, then forced a situation that then required the later power reset on the Observatory's 'Ethernet Over Powerline' plug, meaning the Observatory's LAN connection couldn't then resolve itself, when prehaps the rest of the network did resolve itself ? A separate Continuous Improvement ticket has been raised to consider adding a Smart Plug to the Zigbee Network to allow automated resetting of Observatory's LAN connection.
2) LAN Connection to Observatory went down, stopping uploads to Observatory Website (2023-12-10 22:43). The Observatory's LAN connection was lost for 10 minutes at 22:43 - 22:53 based on LAN flag on ObsPic pictures. Uploading of fresh data to Observatory Website from both the Observatory Computer (AstroPlan program) and the AllSky/Weather Computer (AstroAllSky program) stopped and didn't resume even though the LAN connection restored itself. (Unlike the LAN Connection issue on the previous day (2023-12-09) the Ethernet Over Powerline reboots were required). Windows/Remote Access to observatory computers came back at the end of the LAN outage. Upload of files to Observatory Website was manually restored by restarting AstroPlan and AstroAllSky programs over a VNC remote connection, which reenabled their respective file uploaders. Next time this happens did to see if upload to website is possible from Development Computer to see if issue is an issue of internet connection via the ISP service, or a problem on the home network. This might not isolate the problem as the Observatory is using LAN connection to the router, whilst the Development Computer is using a Wifi connection. Error message logged by AstroPlan at the time of the outage were
2023-12-10 22:42:06.55 | RunFtpQueue has finished uploading a batch of 3
files
2023-12-10 22:43:35.28 | FTP Overseer >> FTP Queue Loop
stalled at 2023-12-10 22:42:34
2023-12-10 22:43:35.28 | FTP
Overseer >> Stall point is inside UploadFileFTP2
2023-12-10
22:45:22.37 | Exception in 'UploadFileFTP2' during PutFiles() for
Session.Header.dat
2023-12-10 22:45:22.37 | Error: Network error:
Software caused connection abort.
2023-12-10 22:45:22.37 | Copying
files to remote side failed.
2023-12-10 22:45:22.37 | Exception in
'UploadFileFTP2' during PutFiles() for Session.Header.dat
2023-12-10 22:45:22.37 | Error: Session has unexpectedly closed
2023-12-10 22:45:22.37 | Exception in 'UploadFileFTP2' during PutFiles() for
GreenhousePic.gif
2023-12-10 22:45:22.37 | Error: Element
session@0 already read to the end
2023-12-10 22:45:22.37 |
Exception in 'UploadFileFTP2' during PutFiles() for
Session.ObsManagerTab.png
2023-12-10 22:45:22.37 | Error: Element
session@0 already read to the end
2023-12-10 22:45:22.37 |
Exception in 'UploadFileFTP2' during PutFiles() for Session.ServicesTab.png
2023-12-10 22:45:22.37 | Error: Element session@0 already read to the end
2023-12-10 22:45:22.37 | FTP Queue >> FTP stopped at 2023-12-10 22:42:06
2023-12-10 22:45:22.37 | Exception in 'UploadFileFTP2' during PutFiles() for
Session.Header.js
2023-12-10 22:45:22.37 | Error: Element
session@0 already read to the end
The 'Element session@0 already read to the end' errors then continued for each subsequent attempt to upload a file. A separate Continuous Improvement ticket has been created to add a button to each of these two programs that can restart each program's file uploader using a fresh WinSCP Connection.
3) LAN Connection to Observatory went down (again), stopping upload of information to website and stopping remote access & window explorer access (2023-12-13 22:29). VNC remote access to Observatory Computer and AllSky/Weather Computer went down at 22:29. Checks showed that the Internet was accessible from Development Computer (over Wifi) and that LAN access to Internet and 'Ethernet Over Powerline' was working ok for the house's SkyHD Box. After waiting more than hour to see if VNC Remote Access to observatory computers would come back the Observatory was visited that confirmed that it had no access to the internet and that there were previously seen exceptions in AstroPlan and AstroAllSky (Error: Network error: Software caused connection abort) from WinSCP/SecureTransfer object. Issue resolved at 23:58 by restarting the Observatories Ethernet Over Powerline plug (proving that there was no need to restart the equivalent plug at the router end, and strengthening the proposal to get a Zigbee Controlled Smart Plug for Powerline Adapter ). The situation provided opportunity to use the 'Restart Loader' buttons in AstroPlan and AstroAllSky to restart their SecureTransfer connections and resume uploading files to Observatory Website, without having to completely restart both programs. This was the third time in five days that the LAN Communication to Observatory has gone down. [ Note: Router admin in 192.168.1.254 not 192.168.1.1 ]
4) LAN Connection to Observatory went down (again), stopping upload
of information to website (2023-12-15 20:00). Checking on
Observatory Website at 00:55 showed that uploads from Observatory Computer and
AllSky/Weather Computer had seemingly stopped with the last AllSky,
WeatherGraph and Obsrevatory pictures having timestamps around 20:00 .
Investigating logs confirmed that exceptions from SecureTransfer connection
began at 20:02 and were still be produced at 00:55. A user intervention was
made to restart SecureTransfer/Web Upload using AstroPlan and AstroAllSky's
'Restart Loader' buttons . Checking ObsPics showed that the LAN went down
just before 20:00 but came back at 20:07. Whilst the LAN outage was
only 7 minutes long the outage in web uploads was 5 hours (and would have
lasted to the morning if the issue hadn't been recognised and an
intervention made. A continuous improvement ticket has already been raised
to make AstroPlan and AstroAllSky programs automatically restart the web
loader if/when the LAN connection is restored (this has now been completed
2023-12-16)
Analysis
xx
Conclusion
xxActions
Back to Top
| This Web Page: | Notes - Session 1172 (2023-12-05) |
| Last Updated : | 2025-12-30 |
| Site Owner : | David Richards |
| Home Page : | David's Astronomy Web Site |










{kind=link}
{kind=link}
{kind=link}